Matriz de Risco
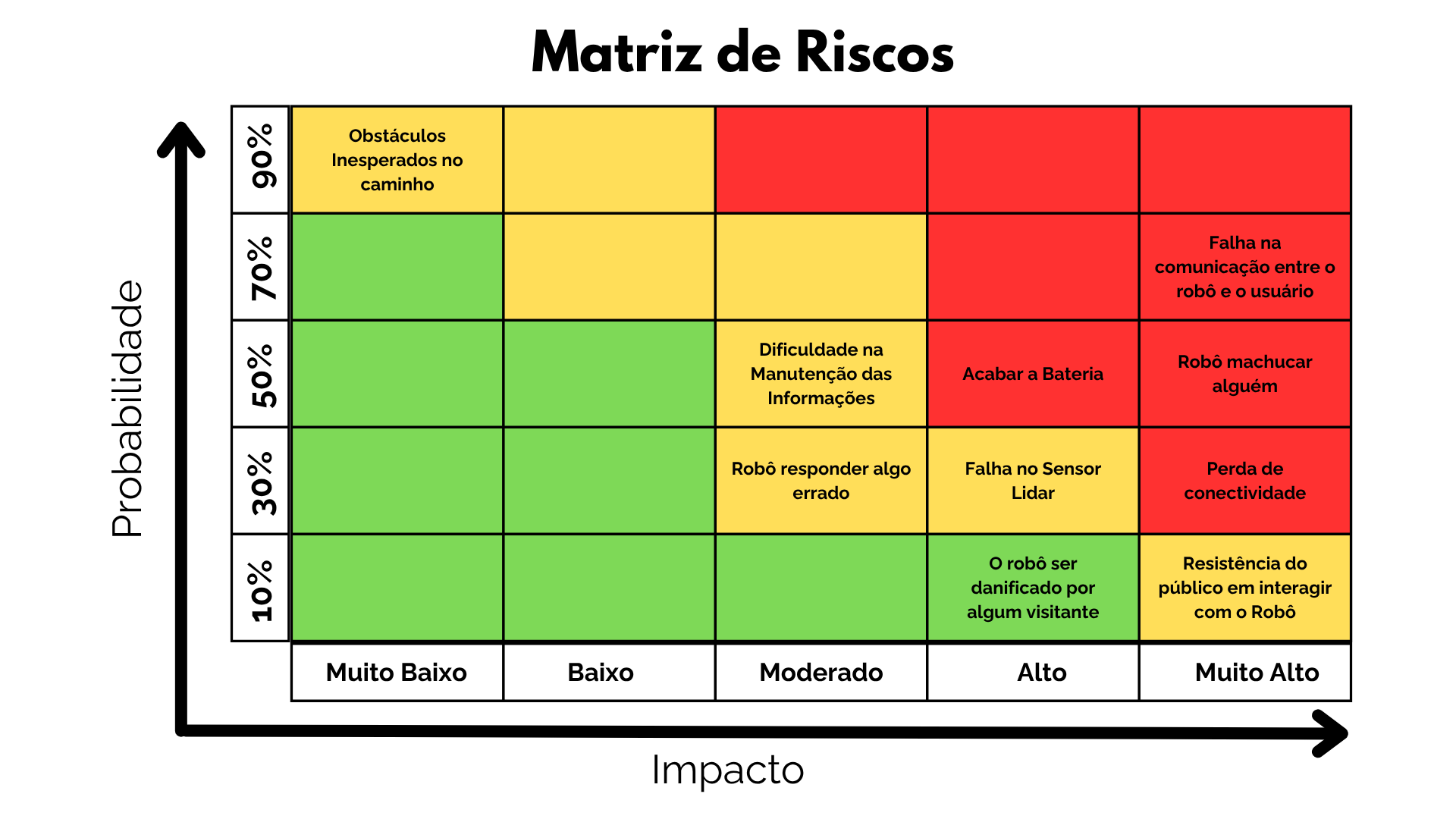
A matriz de riscos é uma ferramenta estratégica para identificar, avaliar e priorizar os riscos potenciais que podem impactar o projeto de desenvolvimento do robô para tours interativas no campus do Inteli. Esta análise classifica os riscos em duas dimensões: Probabilidade (chance de ocorrência) e Impacto (severidade das consequências), permitindo que a equipe concentre esforços nos riscos mais críticos.
Metodologia
A matriz utiliza uma escala de 5x5, onde:
Probabilidade
- Muito Baixo (10%): Risco improvável de ocorrer
- Baixo (30%): Risco com baixa chance de ocorrência
- Moderado (50%): Risco com chance equilibrada de ocorrer ou não
- Alto (70%): Risco provável de ocorrer
- Muito Alto (90%): Risco extremamente provável de ocorrer
Impacto
- Muito Baixo: Impacto mínimo no projeto
- Baixo: Pequenos ajustes necessários
- Moderado: Requer revisão de planejamento e recursos
- Alto: Compromete entregas e objetivos principais
- Muito Alto: Pode inviabilizar o projeto
Classificação por Cor
- Verde: Risco baixo - monitoramento básico
- Amarelo: Risco médio - requer atenção e plano de mitigação
- Vermelho: Risco crítico - ação imediata necessária
Riscos Identificados
CRÍTICOS (Impacto Muito Alto)
1. Perda de Conectividade
Categoria: Técnico Probabilidade: Muito Alta (90%) Impacto: Muito Alto
Descrição: Falha na conexão do robô com sistemas externos (servidor, nuvem, APIs) durante a execução do tour, resultando na interrupção completa do serviço.
Consequências:
- Interrupção total da experiência do visitante
- Perda de credibilidade institucional
- Impossibilidade de responder perguntas via IA generativa
- Dados não sincronizados ou perdidos
Plano de Mitigação:
- Implementar sistema de cache local com conteúdo básico do tour
- Desenvolver modo offline com respostas pré-programadas para FAQs
- Configurar reconexão automática com fallback
- Estabelecer monitoramento em tempo real da qualidade da conexão
- Definir protocolo de operação degradada
Plano de Contingência:
- Guia humano assume o tour imediatamente
- Sistema de notificação automática para equipe técnica
- Robô retorna à base de forma autônoma
2. Falha na Comunicação entre Robô e Usuário
Categoria: Técnico/Experiência do Usuário Probabilidade: Alto (70%) Impacto: Muito Alto
Descrição: Problemas no reconhecimento de voz, processamento de linguagem natural ou na saída de áudio/visual que impedem a interação adequada com visitantes.
Consequências:
- Frustração e decepção dos visitantes
- Experiência negativa associada ao Inteli
- Objetivo de "encantar" não é atingido
- Danos à imagem inovadora da instituição
Plano de Mitigação:
- Treinar modelos com diferentes sotaques e variações linguísticas
- Implementar interface visual complementar (tablet/tela no robô)
- Testar exaustivamente em ambientes com ruído ambiente
- Desenvolver sistema multimodal (voz + touch + gestos)
- Criar biblioteca robusta de sinônimos e variações de perguntas
Plano de Contingência:
- Interface touch screen para interação manual
- QR codes para acesso a informações em smartphones
- Botões físicos para perguntas frequentes
3. Robô Machucar Alguém
Categoria: Segurança/Legal Probabilidade: Moderado (50%) Impacto: Muito Alto
Descrição: Colisão ou comportamento inesperado do robô causando danos físicos a visitantes, especialmente em áreas movimentadas do campus.
Consequências:
- Lesões físicas em visitantes ou colaboradores
- Responsabilidade legal e processos judiciais
- Cancelamento imediato do projeto
- Impacto negativo severo na reputação institucional
- Potencial inviabilização de futuros projetos de robótica
Plano de Mitigação:
- Implementar múltiplos sensores de proximidade (LiDAR, ultrassônicos, câmeras)
- Programar velocidade máxima segura (< 1 m/s em áreas com pessoas)
- Criar zonas de exclusão e limites de operação
- Implementar botão de emergência físico
- Sistema de parada de emergência automática
- Realizar testes de segurança extensivos antes do deployment
- Estabelecer protocolo de supervisão humana durante operação
Plano de Contingência:
- Seguro de responsabilidade civil contratado
- Protocolo de primeiros socorros e acionamento de emergência
- Sistema de desligamento remoto imediato
ALTOS (Impacto Alto)
4. Acabar a Bateria
Categoria: Operacional Probabilidade: Moderado (50%) Impacto: Alto
Descrição: Bateria do robô se esgota durante o tour, interrompendo a experiência e deixando o robô imobilizado em local inconveniente.
Consequências:
- Interrupção abrupta da experiência
- Constrangimento institucional
- Necessidade de resgate manual do robô
- Visitantes sem conclusão do tour
Plano de Mitigação:
- Implementar sistema de gerenciamento inteligente de bateria
- Monitoramento contínuo com alertas em múltiplos níveis (30%, 20%, 10%)
- Algoritmo de retorno automático à estação de carga
- Cálculo preditivo de autonomia baseado em uso real
- Definir duração máxima de tour considerando margem de segurança
- Estações de carga estrategicamente posicionadas
Plano de Contingência:
- Bateria reserva para troca rápida
- Protocolo de conclusão abreviada do tour
- Sistema de hibernação para preservar energia crítica
5. Falha no Sensor Lidar
Categoria: Técnico Probabilidade: Moderado (30%) Impacto: Alto
Descrição: Mau funcionamento ou falha completa do sensor LiDAR responsável pelo mapeamento, localização e navegação autônoma do robô.
Consequências:
- Perda de capacidade de navegação autônoma
- Risco aumentado de colisões
- Impossibilidade de seguir rota planejada
- Desativação necessária do robô
Plano de Mitigação:
- Implementar sistema de navegação redundante (câmeras, sensores ultrassônicos)
- Manutenção preventiva regular do LiDAR
- Monitoramento de saúde do sensor em tempo real
- Calibração periódica automática
- Proteção física adequada contra impactos e sujeira
Plano de Contingência:
- Modo de navegação alternativo com sensores secundários
- Controle manual remoto por operador
- Sensor LiDAR reserva para substituição rápida
MODERADOS
6. Dificuldade na Manutenção das Informações
Categoria: Operacional/Conteúdo Probabilidade: Moderado (50%) Impacto: Moderado
Descrição: Complexidade para atualizar informações sobre processo seletivo, cursos, eventos e FAQ no sistema do robô, resultando em dados desatualizados.
Consequências:
- Informações incorretas fornecidas aos visitantes
- Perda de confiança na solução
- Retrabalho para correções
- Possível impacto em decisões de candidatos
Plano de Mitigação:
- Desenvolver CMS (Content Management System) intuitivo
- Integração automática com site do Inteli e bases de dados oficiais
- Interface web para atualização sem conhecimento técnico
- Versionamento e histórico de mudanças
- Validação de conteúdo antes da publicação
- Processo documentado de atualização
- Responsáveis definidos por tipo de conteúdo
Plano de Contingência:
- Avisos de "informação sujeita a atualização"
- Direcionamento para canais oficiais para confirmação
- Revisão quinzenal obrigatória de conteúdo crítico
7. Robô Responder Algo Errado
Categoria: IA/Conteúdo Probabilidade: Moderado (30%) Impacto: Moderado
Descrição: IA generativa fornece respostas incorretas, inconsistentes ou inadequadas sobre o Inteli, processo seletivo ou outros tópicos.
Consequências:
- Desinformação de potenciais candidatos
- Decisões baseadas em informações incorretas
- Comprometimento da credibilidade
- Necessidade de correções posteriores
Plano de Mitigação:
- Fine-tuning do modelo com base de conhecimento validada
- Implementar sistema de guardrails e validação de respostas
- Limitar escopo de perguntas que o robô pode responder
- Sistema de confidence score - encaminhar para humano se baixo
- Logs de todas as interações para auditoria
- Revisão periódica de conversas para identificar erros
- Base de conhecimento RAG (Retrieval-Augmented Generation)
Plano de Contingência:
- Disclaimer em todas as respostas complexas
- Contato direto com admissões sempre disponível
- Formulário de feedback para reportar inconsistências
8. Resistência do Público em Interagir com o Robô
Categoria: Adoção/Experiência do Usuário Probabilidade: Baixo (10%) Impacto: Moderado
Descrição: Visitantes podem sentir desconforto, timidez ou preferir interação humana, reduzindo a adesão ao tour robótico.
Consequências:
- Baixa taxa de utilização da solução
- ROI do projeto comprometido
- Necessidade de manter tours humanos em paralelo
- Objetivo de inovação parcialmente frustrado
Plano de Mitigação:
- Design do robô amigável e não intimidador
- Introdução por guia humano para quebrar o gelo
- Demonstrações prévias e vídeos promocionais
- Opção de tour híbrido (robô + acompanhamento humano)
- Coleta de feedback e iteração baseada em UX
- Gamificação da experiência (quizzes, interações lúdicas)
Plano de Contingência:
- Tour tradicional com humano sempre disponível como opção
- Robô como complemento, não substituto total
BAIXOS
9. O Robô Ser Danificado por Algum Visitante
Categoria: Segurança/Operacional Probabilidade: Baixo (10%) Impacto: Moderado
Descrição: Vandalismo, manuseio inadequado ou comportamento malicioso de visitantes causando danos ao robô.
Consequências:
- Custos de reparo ou substituição
- Interrupção temporária do serviço
- Necessidade de supervisão mais próxima
Plano de Mitigação:
- Supervisão discreta durante operação
- Câmeras de monitoramento nas áreas de tour
- Educação prévia sobre interação adequada
- Construção robusta e materiais resistentes
- Sensores de toque para detectar manuseio inadequado
- Termo de responsabilidade para grupos
Plano de Contingência:
- Seguro contra danos
- Peças de reposição em estoque
- Protocolo de identificação e responsabilização
10. Obstáculos Inesperados no Caminho
Categoria: Operacional Probabilidade: Muito Alto (90%) Impacto: Baixo
Descrição: Objetos temporários, pessoas, móveis ou outros obstáculos não mapeados no caminho planejado do tour.
Consequências:
- Desvios na rota planejada
- Pequenos atrasos no tour
- Necessidade de recalcular caminho
Plano de Mitigação:
- Sistema de desvio de obstáculos em tempo real
- Sensores de proximidade multidirecionais
- Algoritmos de path planning dinâmico
- Mapeamento atualizado regularmente
- Comunicação verbal de obstáculos ("Com licença, por favor")
Plano de Contingência:
- Rota alternativa pré-programada
- Capacidade de aguardar obstáculo ser removido
- Solicitação de ajuda humana se bloqueio persistir
Considerações Finais
Esta matriz de riscos é um documento vivo que deve ser atualizado continuamente ao longo do projeto. A identificação proativa e gestão adequada destes riscos é fundamental para:
- Garantir a segurança de todos os envolvidos
- Assegurar a qualidade da experiência dos visitantes
- Proteger o investimento e a reputação institucional
- Viabilizar o sucesso do projeto de inovação
A equipe deve manter comunicação transparente sobre riscos identificados e trabalhar colaborativamente na implementação das estratégias de mitigação definidas.