Robô
Nosso robô chama "bolin" :)
Esta página fornece uma visão detalhada sobre os componentes e funcionalidades rodando diretamente no robô, todos desenvolvidos utilizando ROS2. Abordaremos os nodes principais como bolin_teleop, bolin_camera e bolin_lidar, explicando como cada um deles contribui para o controle do robô, aquisição de imagens e detecção de obstáculos. A documentação também inclui considerações sobre decisões de design e próximos passos para melhorias na performance e eficiência do sistema.
Descrição Geral
Toda a comunicação e programação relacionadas ao robô são realizadas em ROS2. Rodamos vários nós para diferentes funcionalidades, como a câmera, a teleoperação e o lidar. Utilizamos um launchfile para inicializá-los.
Nós em Execução
- Nó da Câmera
- Nós de Teleop
- Nó do Lidar
Bolin_Teleop
O node bolin_teleop é responsável por ouvir os tópicos linear_speed e angular_speed, processar os valores recebidos (convertidos de porcentagens) e publicar um comando Twist no tópico cmd_vel, que controla o movimento do robô.
Configuração do Movimento
- Utilizamos o node do Turtlebot3 (
ros2 launch turtlebot3_bringup robot.launch.py) para receber e interpretar os comandoscmd_vel.
Local de Execução
- Embora trate do movimento do robô, o node
bolin_teleopé executado junto do servidor back-end para maximizar a performance, dado que a Raspberry Pi 4 usada no robô tem limitações de processamento.
Bolin_Camera
O node bolin_camera utiliza OpenCV OpenCV para capturar imagens da câmera. As imagens são comprimidas e enviadas no tópico /camera_feed. As imagens são enviadas em um spin em vez de um timer callback, como utilizado inicialmente, para melhorar a performance.
Transmissão de Imagens
-
Avaliamos o uso de
cv_bridgecv_bridge para facilitar a transmissão das imagens. As imagens são recebidas pelo back-end para processamento e envio ao Front-End. No entanto, considerando o tempo de entrega do projeto, foi decidido manter a transmissão de imagens diretamente pelo ROS2 e será considerado o teste na sprint seguinte. -
Também consideramos utilizar escrever o nó em C++ para melhorar a performance e diminuit a latência na transmissão. No entanto, após testes, percebemos que a diferença não era significativa. Segue abaixo os testes realizados:
Teste com C++
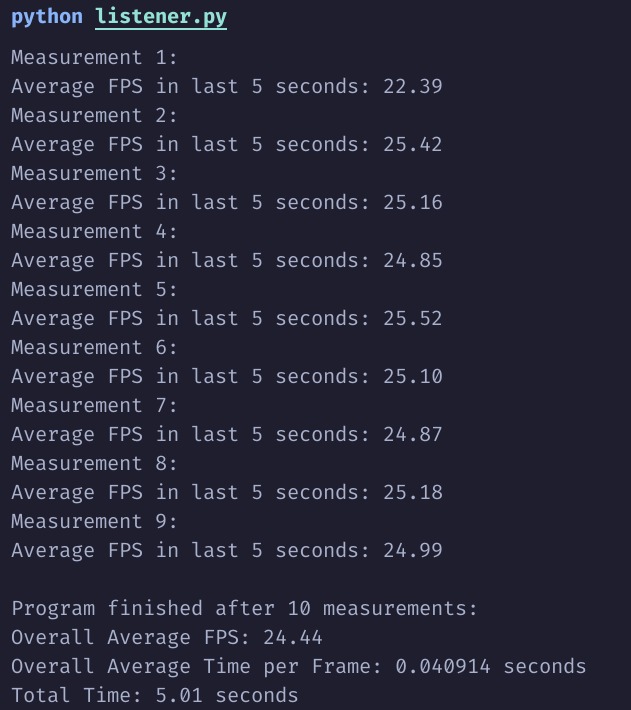
Teste com Python
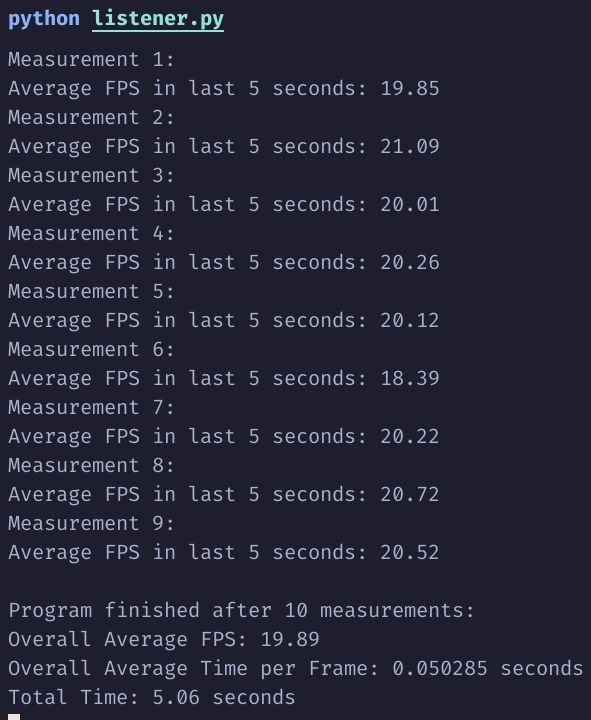
Portanto, a partir dessa comparação, foi decidido que o nó continuaria sendo escrito em Python.
Bolin_Lidar
O node lidar processa os dados recebidos do tópico /scan, dividindo-os em 8 direções principais.
Processamento de Dados
- Seleciona o menor valor de cada direção e publica no tópico
/lidar.
Local de Execução
- Este node, embora relacionado ao robô, é executado no servidor back-end para melhorar a performance.