Revisão da arquitetura do sistema
Introdução
Nesta seção, fornecemos uma visão abrangente da arquitetura de solução do nosso sistema de controle de robôs. A arquitetura é dividida em três principais subsistemas: Back-End, Robô e Front-End. Cada subsistema desempenha um papel crucial na comunicação e operação do robô.
-
O Robô executa nós específicos para controle de movimento, aquisição de imagens e detecção de obstáculos, todos desenvolvidos em ROS2.
-
O Back-End orquestra a comunicação entre o Front-End e o Robô, utilizando tecnologias como ROS2 e WebSockets.
-
O Front-End fornece uma interface intuitiva para os usuários controlarem o robô e visualizarem informações em tempo real.
Diagrama de Arquitetura
O diagrama abaixo representa a comunicação entre os subsistemas Back-End, Robô e Front-End, destacando os componentes de teleoperação, câmera e lidar. Caso queira ter uma melhor visualização do diagrama abaixo, também pode vê-lo aqui.
Arquitetura
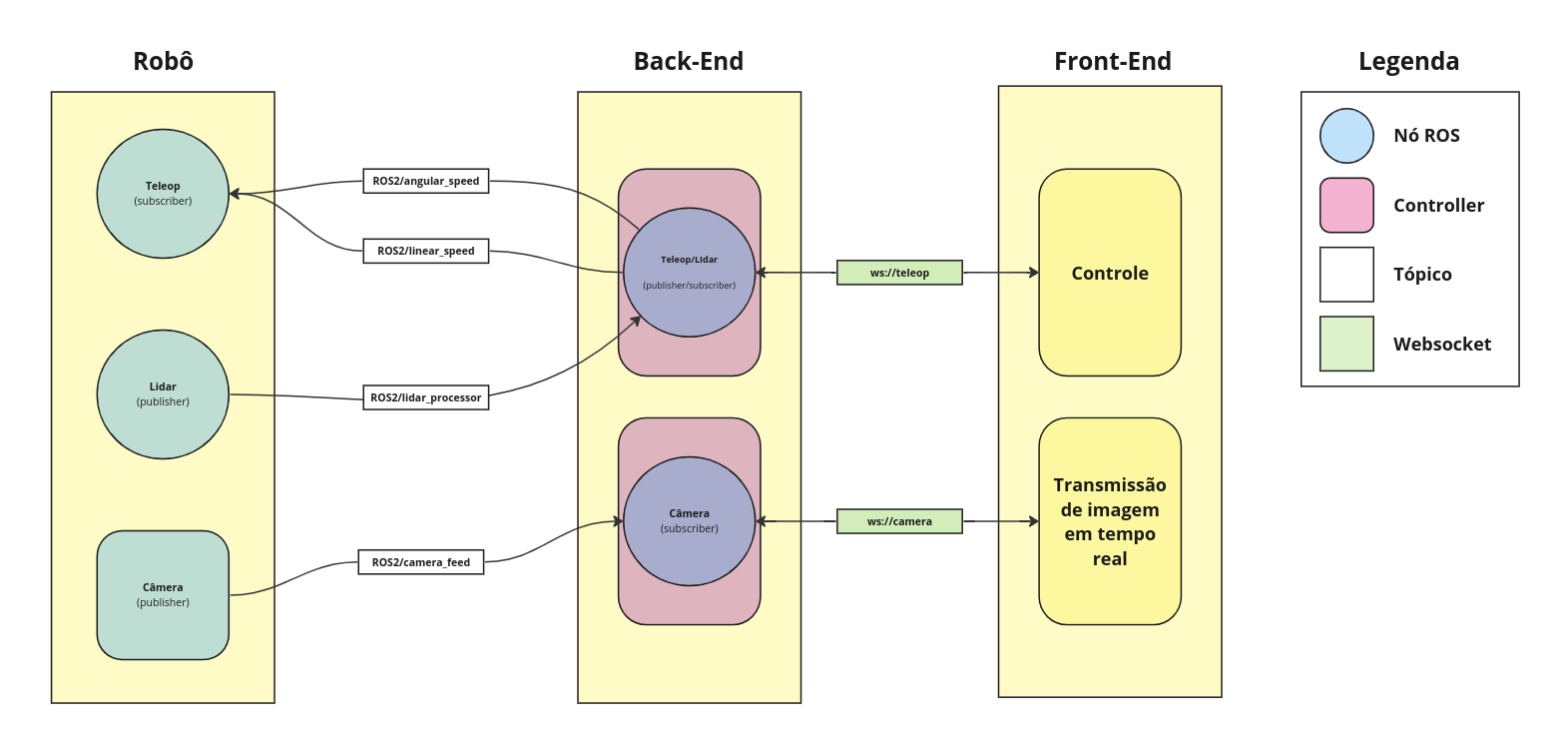
Fonte: Elaborado pela equipe Rebólins
Instruções de execução
Para executar o projeto, siga as instruções abaixo:
Clone o repositório:
git clone git@github.com:Inteli-College/2024-1B-T08-EC06-G03.git
cd 2024-T0008-EC06-G03/
Robô
-
Instale o ROS2
-
Acesse a pasta do robô
cd src/bolin/
- Execute o robô
ros2 run bolin bolin
ros2 run bolin_lidar bolin_lidar
ros2 run bolin_camera camera
Back-End
-
Instale o Node.js
-
Acesse a pasta do Back-End
cd src/backend/
- Instale as dependências
npm install
- Execute o Back-End
npm start
Front-End
-
Instale o Node.js
-
Acesse a pasta do Front-End
cd src/frontend/
- Instale as dependências
npm install
- Execute o Front-End
npm run dev
- Acesse http://localhost:5173 no seu navegador.