Teste de Requisitos
Este documento é responsável por detalhar testes de funcionalidade para requisitos funcionais e testes de validação para requisitos não funcionais.
Os requisitos funcionais estabelecidos anteriormente podem ser visualizados aqui, já os requisitos n�ão funcionais neste link.
Testes de funcionalidade: requisito funcional
Contexto
Dos requisitos funcionais estabelecidos anteriormente, o escolhido foi:
RF03: O robô deve ter um sistema de colisão. Neste requisito, o Operador Industrial estará pilotando o robô via controle remoto. No entanto, caso o robô se aproxime a uma determinada distância de um objeto ou ser vivo, o alerta será acionado na tela para notificar o usuário.
O RF escolhido se dá pela sua importância na teleoperação do robô e por mesclar fatores como controle pela interface gráfica, sistema de colisão e alerta acionado.
Roteiro de teste
Todo teste é seguido por uma tarefa. E toda tarefa é realizada por um perfil/persona que obtém um resultado geral e um resultado por etapas.
Sendo assim, para garantir que o RF esteja de acordo com o estabelecido, foram criados critérios para avaliar se o teste foi realizado com sucesso ou não. O RF escolhido, neste caso, é a tarefa.
No geral, foram avaliados 4 fatores:
- Tarefa a ser realizada
- Perfil/persona que está realizando o teste;
- Resultado geral: sucesso, conseguiu com dificuldade e não conseguiu;
- Resultado por etapa: descrição detalhando o ocorrido.
E a condução dos testes deve acontecer da seguinte forma:
- Explicação do projeto para o testador, destacando o objetivo (tarefa) a ser realizada e a posição como persona.
- Realizar o setup previamente do robô: rodar a interface, o BringUp do turtlebot, a conexão WebSocket e o envio dos dados da câmera.
- Fornecer o notebook para teleoperar o robô e anotar as informações coletadas.
Relatório de execução
Fonte: Elaboração Grupo Repipe
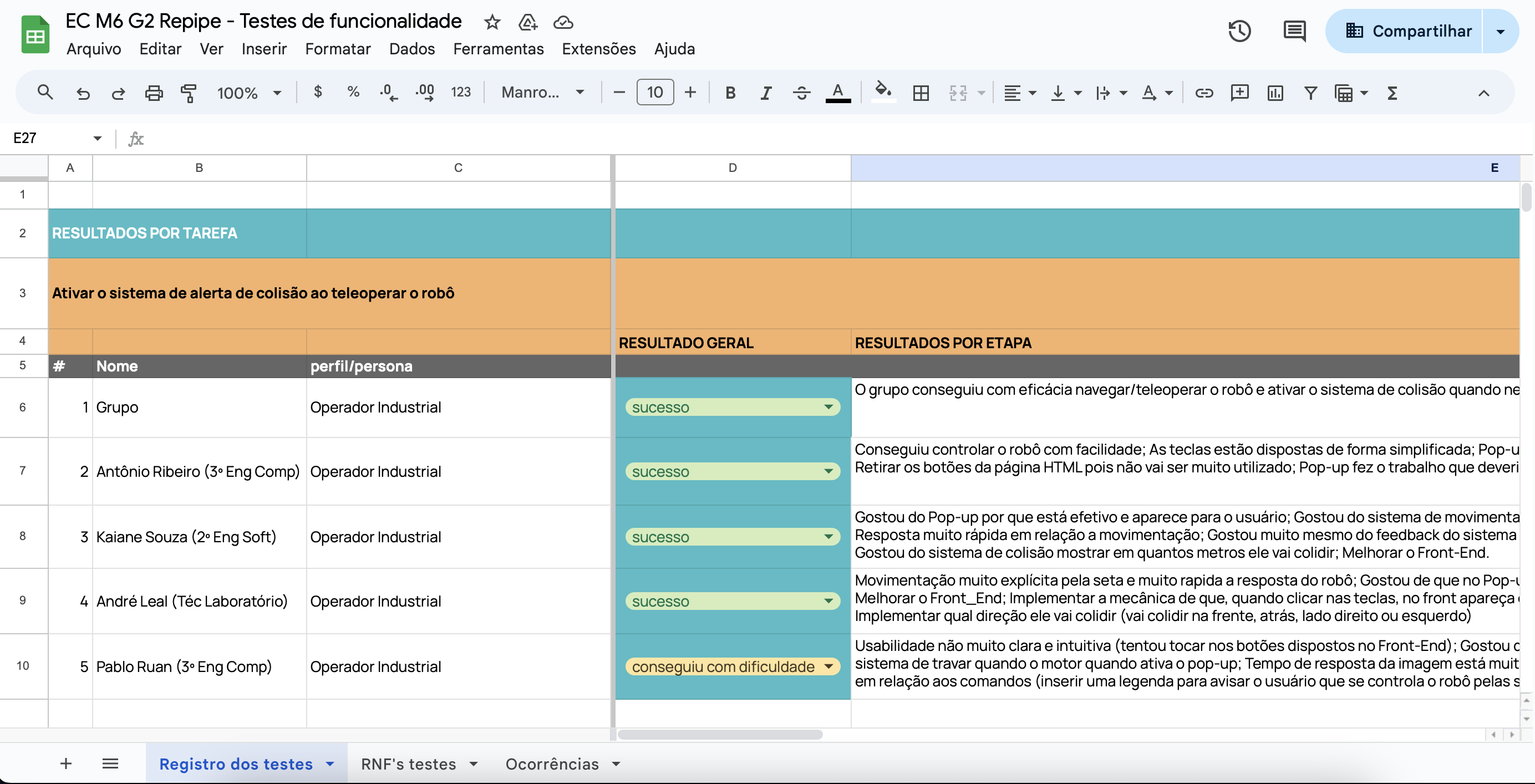
Os testes foram executados por 4 pessoas, além do teste realizado pelo grupo. Os resultados podem ser visualizados neste arquivo do Google Sheets.
No geral, este foi o resultado obtido:
| Tarefa | Usuários | Perfil/Persona | Resultado Geral |
|---|---|---|---|
| 1 | Grupo | Operador Industrial | Sucesso |
| 1 | Antônio Ribeiro (3º Eng Comp) | Operador Industrial | Sucesso |
| 1 | Kaiane Souza (2º Eng Soft) | Operador Industrial | Sucesso |
| 1 | André Leal (Téc Laboratório) | Operador Industrial | Sucesso |
| 1 | Pablo Ruan (3º Eng Comp) | Operador Industrial | Conseguiu com dificuldade |
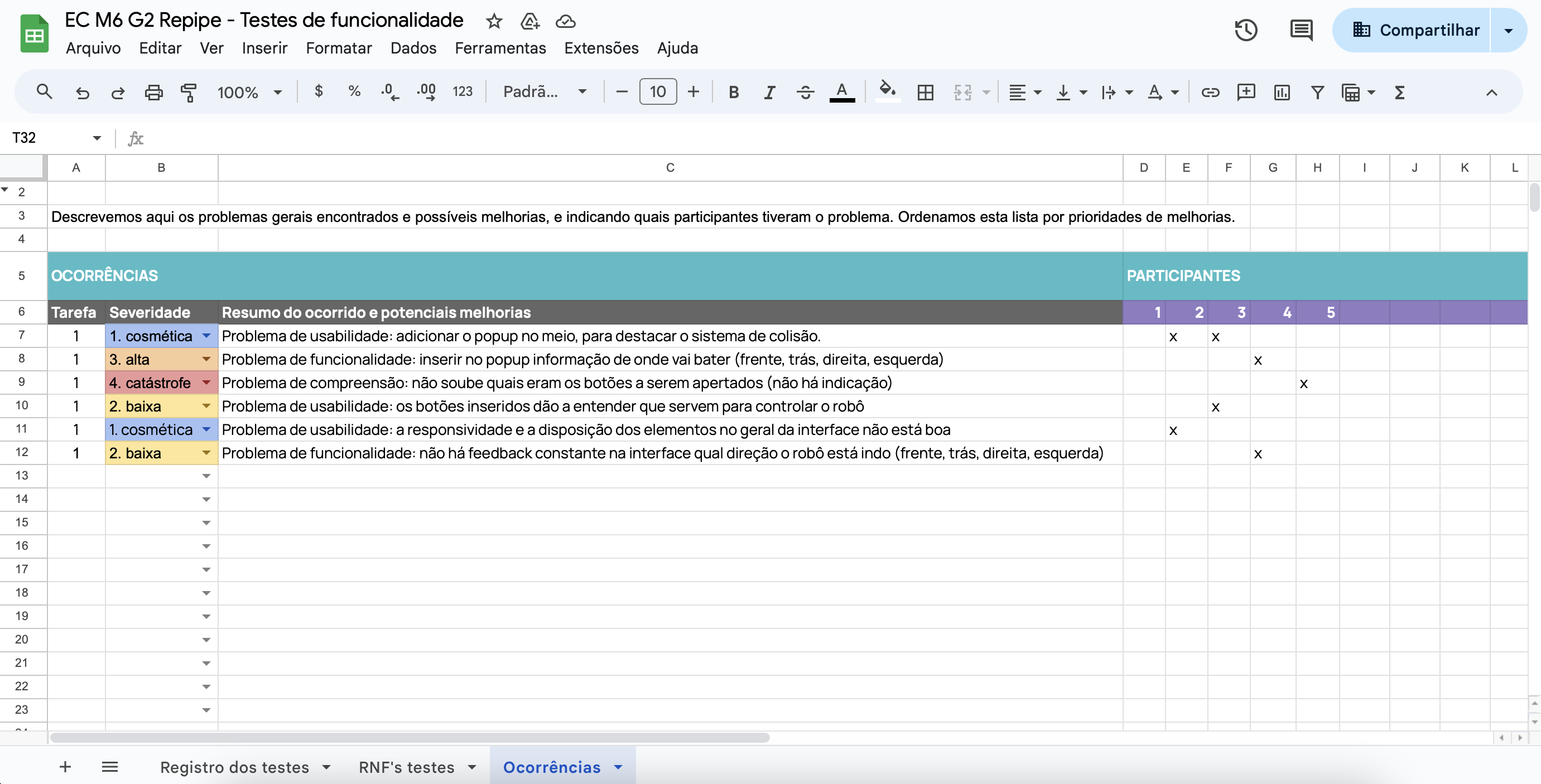
Além disso, destacou-se os principais problemas observados, classificando por nível de severidade e potenciais melhorias. Isto pode ser observado na segunda aba "ocorrências" do mesmo arquivo Google Sheets.
Nele também é possível observar se o problema relatado é um problema de funcionalidade, usabilidade ou compreensão.
Fonte: Elaboração Grupo Repipe
Conclusão
Como conclusão do teste de funcionalidade realizado, foram recebidos os seguintes feedbacks:
- Controle fácil do robô.
- Movimentação intuitiva via teclado.
- Resposta rápida para movimentação.
- Sistema de alerta via pop-up eficaz.
- Resposta rápida do vídeo e imagem.
E como pontos de melhoria, foram obtidos os seguintes pontos:
- Posicionamento do Pop-up: Mover o pop-up para o centro da tela para destacar mais eficazmente o sistema de colisão.
- Informações adicionais no Pop-up: Inserir no pop-up informações sobre a direção da colisão (frente, trás, direita, esquerda) para ajudar na orientação do usuário.
- Indicação dos botões: Fornecer indicações claras de quais botões devem ser apertados, possivelmente destacando-os visualmente ou incluindo legendas explicativas.
- Feedback constante na interface: Implementar um sistema que ofereça feedback constante sobre a direção em que o robô está se movendo, usando, por exemplo, indicações de cor nos botões ou setas.
- Melhoria na disposição dos elementos da interface: Aperfeiçoar a responsividade e a disposição geral dos elementos na interface para melhorar a usabilidade e a estética geral.
Testes de validação: requisito não funcional
Contexto
Dos requisitos não funcionais estabelecidos anteriormente, os seguintes foram escolhidos:
- RNF01 - Autonomia do robô: Diante da operação contínua do robô, durante o processo de limpeza, o mesmo deve ter autonomia necessária para verificar ao menos um reboiler, por vez. Sendo assim, é preciso ter uma autonomia de no mínimo 4 horas.
O RNF escolhido para compor os testes é considerado muito importante, pois é necessário entender a autonomia da bateria e seu comportamento quando todos os componentes estão operando simultaneamente (Raspberry Pi, câmera, motores). Este teste é crucial para analisar e determinar se é viável adicionar uma bateria mais potente para alimentar o robô, possibilitando maior autonomia no dia a dia na inspeção dos reboilers.
- RNF03 - Latência de comunicação Visto que haverá uma teleoperação em tempo real do robô, o sitema deve ter uma latência de comunicação estável e baixa. Nesse caso, uma latência de no máximo 150ms, com picos de 30ms para mais ou menos.
O RNF escolhido se dá pela importância na teleoperação do robô e é de super importância esse dado ja que, a latência varia de forma com a distância e o ambiente onde esteja para se comunicar e controlar o robô.
- RNF05 - Interface interativa: Com base no nível de letramento digital dos possíveis usuários, interface do usuário precisa ser facilmente compreendida ao primeiro contato e possuir os princípios das heurísticas de Nilsen.
Esse RNF é de suma importância, pois permite compreender como o usuário interage com a página disponibilizada, facilitando o uso dos controles para comandar o robô. Através desses testes, pode-se ver se os comandos e teclas dispostos na tela estão fáceis para o usuário poder usar o robô com facilidade. Partindo desse teste, é possível entender e aplicar modificações em nossa página com o auxílio dos feedbacks fornecidos.
Roteiro de teste
Todo teste é seguido por uma tarefa. E toda tarefa é realizada por um perfil/persona que obtém um resultado geral e um resultado por etapas.
Sendo assim, para garantir que o RNF esteja de acordo com o estabelecido, foram criados critérios para avaliar se o teste foi realizado com sucesso ou não.
No geral, foram avaliados 4 fatores:
- Tarefa a ser realizada
- Perfil/persona que está realizando o teste;
- Resultado geral: sucesso, conseguiu com dificuldade e não conseguiu;
- Resultado por etapa: descrição detalhando o ocorrido.
E a condução dos testes deve acontecer da seguinte forma:
- Explicação do projeto para o testador, destacando o objetivo (tarefa) a ser realizada e a posição como persona.
- Realizar o setup previamente do robô: rodar a interface, o BringUp do turtlebot, a conexão WebSocket e o envio dos dados da câmera.
- Fornecer o notebook para teleoperar o robô e anotar as informações coletadas.
Tarefa para o teste de autonomia do robô
O "Teste de autonomia" em questão será realizado pelo grupo de desenvolvedores para observar o comportamento da bateria com todos os componentes em funcionamento e avaliar a duração suportada pela mesma. Este teste é crucial para compreender como o robô opera à medida que a bateria descarrega e determinar a autonomia total da bateria.
1. Autonomia do Robô (RNF01):
- Passo 1: Monte um ambiente controlado com obstáculos representativos e uma área de movimento para o robô.
- Passo 2: Crie um script que simule as atividades típicas do robô, como movimento, coleta de dados e comunicação.
- Passo 3: Pegue a bateria totalmente carregada 12.6V e acople no robô
- Passo 4: Lique um cronômetro e execute o script por um período e verifique se o consumo simulado de energia está dentro da capacidade da bateria do robô. OBS: É importante notar que o Turtlebot, por padrão, começa a emitir um sinal sonoro quando a tensão da bateria chega a 11.0V como medida de segurança. Quando o sinal sonoro começar, o cronômetro será interrompido para registrar a duração alcançada.
- Passo 5: Após o início do apito, o cronômetro é interrompido e o tempo de funcionamento do robô é registrado.
Relatório de execução
Segue imagem do relatório de execução de autonomia do robô com a bateria em 100% (12.6V):
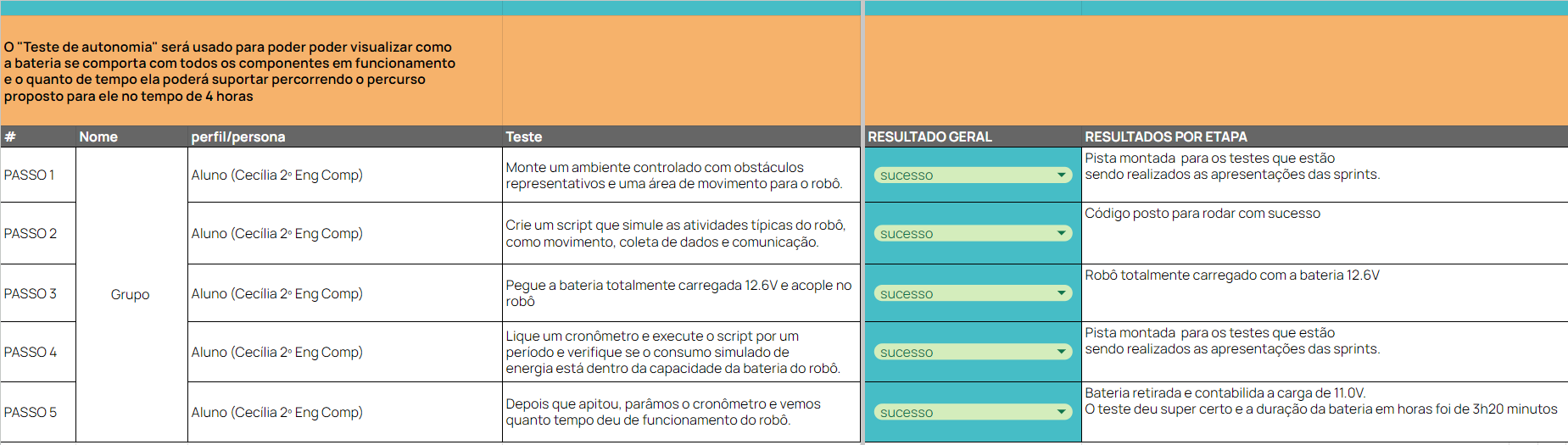
Fonte: Elaboração Grupo Repipe
Os testes foram executados pelo grupo de desenvolvedores. Os resultados podem ser visualizadosneste arquivo do Google Sheets.
No geral, este foi o resultado obtido:
| # | Nome | Perfil/Persona | Teste | Resultado Geral |
|---|---|---|---|---|
| PASSO 1 | GRUPO | Aluno (Cecília 2º Eng Comp) | Monte um ambiente controlado com obstáculos representativos e uma área de movimento para o robô. | Sucesso |
| PASSO 2 | GRUPO | Aluno (Cecília 2º Eng Comp) | Crie um script que simule as atividades típicas do robô, como movimento, coleta de dados e comunicação. | Sucesso |
| PASSO 3 | GRUPO | Aluno (Cecília 2º Eng Comp) | Pegue a bateria totalmente carregada 12.6V e acople no robô | Sucesso |
| PASSO 4 | GRUPO | Aluno (Cecília 2º Eng Comp) | Lique um cronômetro e execute o script por um período e verifique se o consumo simulado de energia está dentro da capacidade da bateria do robô. | Sucesso |
| PASSO 5 | GRUPO | Aluno (Cecília 2º Eng Comp) | Depois que apitou, parâmos o cronômetro e vemos quanto tempo deu de funcionamento do robô. | Sucesso |
Além disso, são destacados os principais problemas observados, classificando por nível de severidade e potenciais melhorias. Isto pode ser observado na segunda aba "ocorrências" do mesmo arquivo Google Sheets.
Conclusão
Os testes demonstraram que o robô não alcançou o objetivo inicial de quatro horas de operação, operando eficientemente por três horas e vinte minutos. A diferença de quarenta minutos sugere a possibilidade de aprimorar a gestão de energia ou otimizar os componentes do robô para aumentar a eficiência da bateria. Para avançar, torna-se fundamental investigar como diversas condições operacionais, incluindo variações de carga e condições ambientais, impactam a duração da bateria. A análise detalhada das ocorrências e reações registradas contribuirá para a identificação de pontos específicos de melhoria técnica, garantindo avanços contínuos na performance e na confiabilidade do robô em futuras implementações.
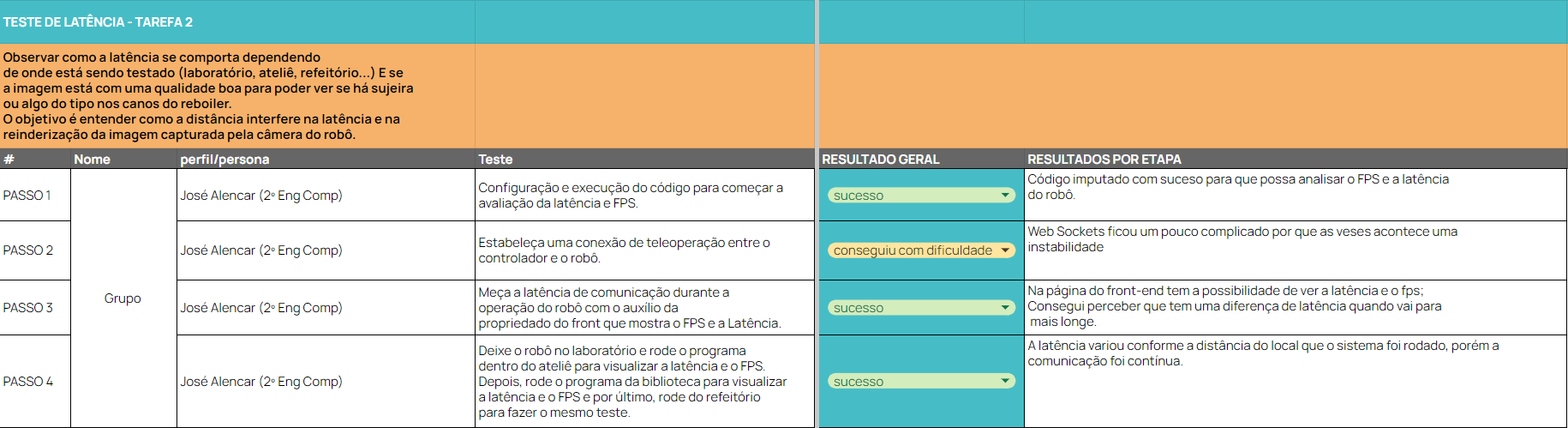
Tarefa para o teste de latência
O "Teste de Latência" em questão será realizado pelo grupo de desenvolvedores para analisar como a latência varia dependendo da localização do computador utilizado e da execução do teste para controlar o robô. Será verificado se a persona/tester consegue enviar comandos ao robô e se este responde adequadamente com movimentação. Durante o teste, também será avaliado o tempo de renderização da imagem, permitindo que o operador visualize o que a câmera está transmitindo com qualidade suficiente para detectar sujeiras ou qualquer tipo de defeito nos canos do reboiler.
2. Latência de Comunicação (RNF03):
- Passo 1: Configuração e execução do código para começar a avaliação da latência e FPS.
- Passo 2: Estabeleça uma conexão de teleoperação entre o controlador e o robô.
- Passo 3: Meça a latência de comunicação durante a operação do robô com o auxílio da propriedado do front que mostra o FPS e a Latência.
- Passo 4: Deixe o robô no laboratório e rode o programa dentro do ateliê para visualizar a latência e o FPS. Depois, rode o programa da biblioteca para visualizar a latência e o FPS e por último, rode do refeitório para fazer o mesmo teste.
Relatório de execução
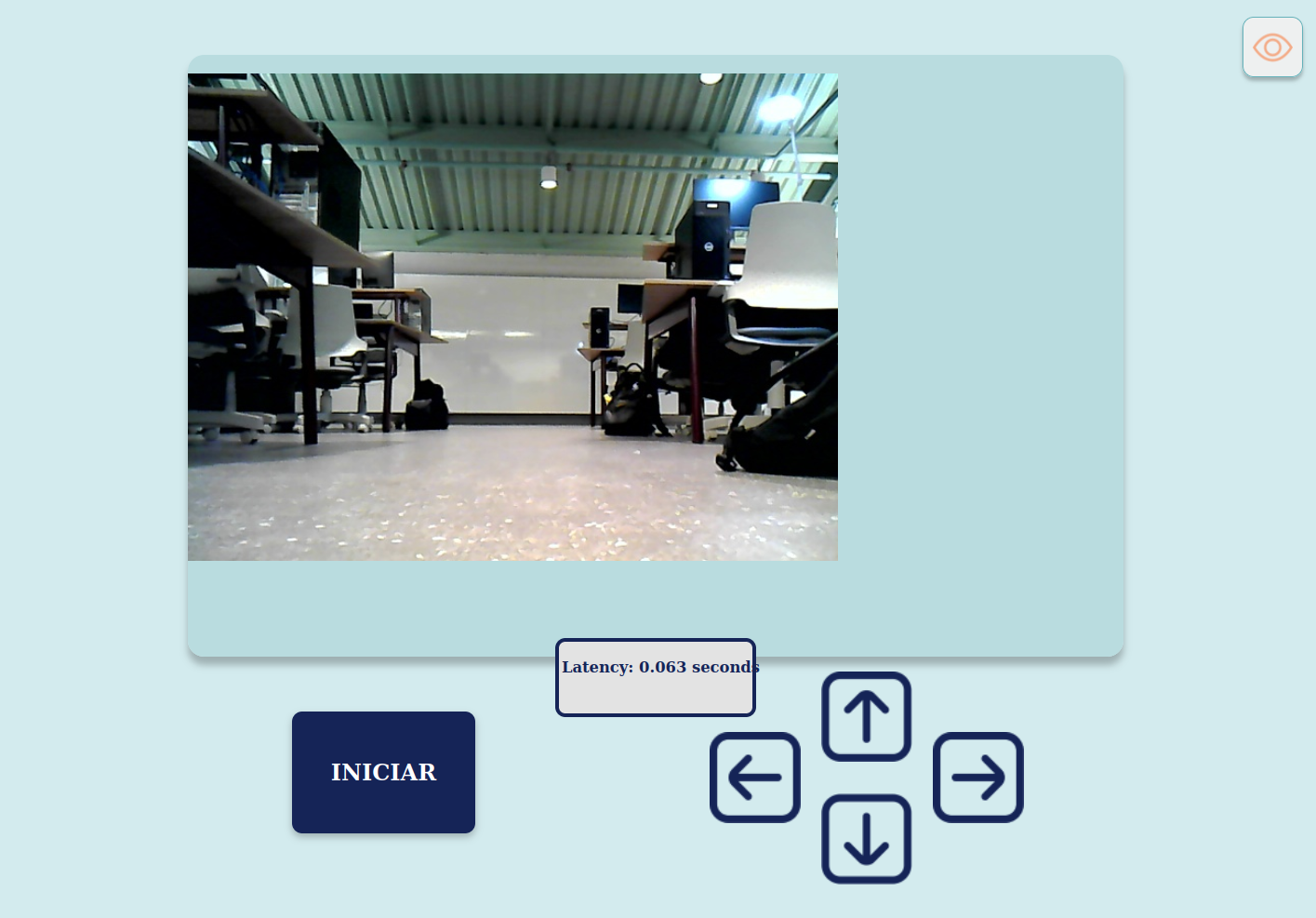
Segue imagem do relatório de execução da latência e FPS do robô:
Fonte: Elaboração Grupo Repipe
Os testes foram executados pelo grupo de desenvolvedores. Os resultados podem ser visualizados neste arquivo do Google Sheets.
No geral, este foi o resultado obtido:
| # | Nome | Perfil/Persona | Teste | Resultado Geral |
|---|---|---|---|---|
| PASSO 1 | GRUPO | Aluno (José Alencar 2º Eng Comp) | Configuração e execução do código para começar a avaliação da latência e FPS. | Sucesso |
| PASSO 2 | GRUPO | Aluno (José Alencar 2º Eng Comp) | Estabeleça uma conexão de teleoperação entre o controlador e o robô. | Conseguiu com dificuldade |
| PASSO 3 | GRUPO | Aluno (José Alencar 2º Eng Comp) | Meça a latência de comunicação durante a operação do robô com o auxílio da propriedado do front que mostra o FPS e a Latência. | Sucesso |
| PASSO 4 | GRUPO | Aluno (José Alencar 2º Eng Comp) | Deixe o robô no laboratório e rode o programa dentro do ateliê para visualizar a latência e o FPS. Depois, rode o programa da biblioteca para visualizar a latência e o FPS e por último, rode do refeitório para fazer o mesmo teste. | Conseguiu com dificuldade |
Além disso, foram destacados os principais problemas observados, classificando por nível de severidade e potenciais melhorias. Isto pode ser observado na segunda aba "ocorrências" do mesmo arquivo Google Sheets.
Conclusão
Os testes de latência e FPS do robô mostraram que ele, inicialmente, não manteve a latência dentro de limites aceitáveis em vários ambientes, incluindo alguns problemas iniciais com a conexão de teleoperação.
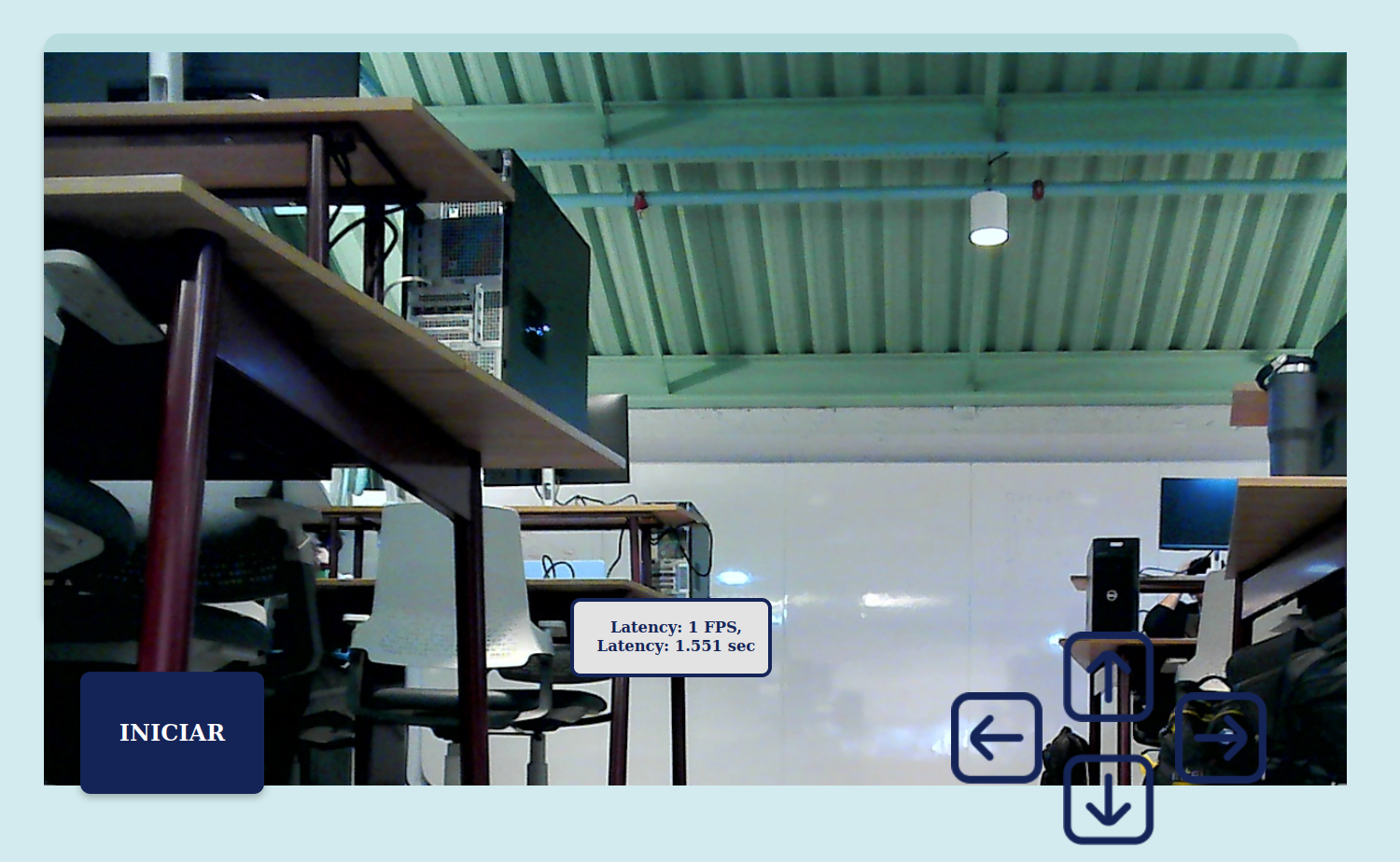
Fonte: Elaboração Grupo Repipe
A imagem acima demonstra o valor médio da latência ao medir em diferentes ambientes, que está em 1.5 segundos, ou, 1500ms. A nossa métrica exigia no máximo 150ms de latência, com picos de 30ms para mais ou menos.
Os resultados indicam que a otimização contínua é necessária, principalmente na conexão, para aumentar a eficiência operacional em ambientes difíceis. Além disso, é aconselhável realizar uma análise minuciosa das ocorrências com o objetivo de orientar melhorias e ajustes técnicos no futuro.
Propostas de melhoria estão detalhadas melhor na seção "Proposta de Melhoria".
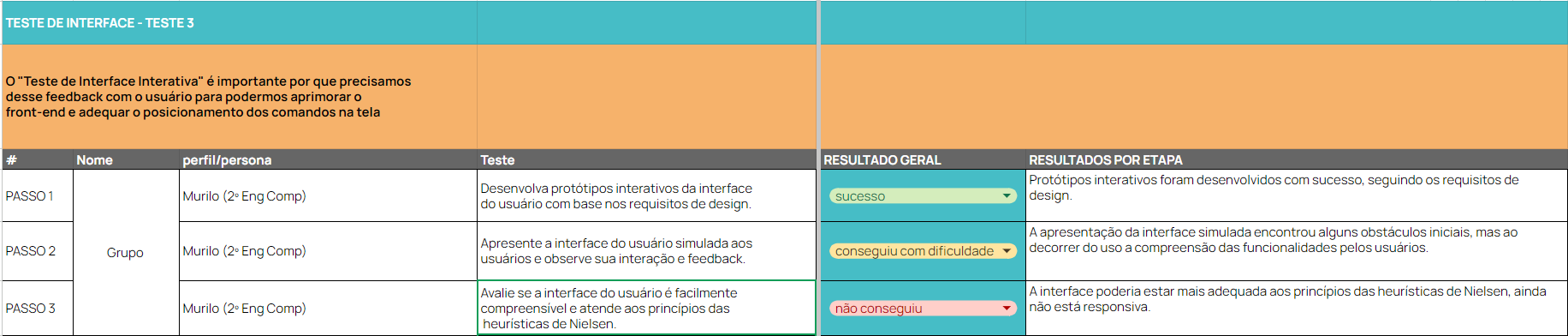
Tarefa para o teste de interface interativa
O "Teste de Interface Interativa" será realizado pelo grupo de desenvolvedores para avaliar a usabilidade da interface do usuário. Este teste é fundamental para garantir que a interface seja facilmente compreendida ao primeiro contato, seguindo os princípios das heurísticas de Nielsen. Durante o teste, os desenvolvedores observarão como os usuários interagem com a interface, identificando possíveis dificuldades e coletando feedback para melhorias. A realização deste teste é essencial para assegurar que os controles do robô sejam intuitivos e eficientes para todos os usuários, independentemente do seu nível de letramento digital.
Heurísticas de Nielsen
As Heurísticas de Nielsen são um conjunto de dez princípios gerais para o design de interface de usuário, propostos por Jakob Nielsen. Elas servem como diretrizes para avaliar a usabilidade de um sistema. Aqui estão resumidamente:
- Visibilidade do status: Informar sempre o usuário sobre o que está acontecendo.
- Compatibilidade com o mundo real: Usar linguagem e conceitos familiares ao usuário.
- Controle e liberdade: Fornecer formas fáceis de desfazer e refazer ações.
- Consistência e padrões: Manter uniformidade no design e seguir convenções.
- Prevenção de erros: Evitar que erros aconteçam com um design cuidadoso.
- Reconhecimento em vez de lembrança: Tornar opções visíveis para reduzir a carga de memória.
- Flexibilidade e eficiência: Permitir atalhos e personalização para usuários experientes.
- Design estético e minimalista: Evitar informações irrelevantes ou desnecessárias.
- Ajuda no reconhecimento de erros: Mensagens de erro claras e úteis.
- Ajuda e documentação: Fornecer documentação fácil de buscar e usar.
Essas heurísticas são amplamente utilizadas no design de interfaces para melhorar a usabilidade e a experiência do usuário e essas heurísticas vão nos ajudar com as métricas e avaliações a serem feitas internamente.
3. Interface Interativa (RNF05):
- Passo 1: Desenvolva protótipos interativos da interface do usuário com base nos requisitos de design.
- Passo 2: Apresente a interface do usuário simulada aos usuários e observe sua interação e feedback.
- Passo 3: Avalie se a interface do usuário é facilmente compreensível e atende aos princípios das heurísticas de Nielsen.
Relatório de execução
Segue imagem do relatório de visualização da interface interativa para controlar o robô e visualizar a imagem da câmera:
Fonte: Elaboração Grupo Repipe
Os testes foram executados pelo grupo de desenvolvedores. Os resultados podem ser visualizadosneste arquivo do Google Sheets.
No geral, este foi o resultado obtido:
| # | Nome | Perfil/Persona | Teste | Resultado Geral |
|---|---|---|---|---|
| PASSO 1 | GRUPO | Aluno (Murilo 2º Eng Comp) | Desenvolva protótipos interativos da interface do usuário com base nos requisitos de design. | Sucesso |
| PASSO 2 | GRUPO | Aluno (Murilo 2º Eng Comp) | Apresente a interface do usuário simulada aos usuários e observe sua interação e feedback. | Conseguiu com dificuldade |
| PASSO 3 | GRUPO | Aluno (Murilo 2º Eng Comp) | Avalie se a interface do usuário é facilmente compreensível e atende aos princípios das heurísticas de Nielsen. | Não deu certo |
Além disso, foram destacados os principais problemas observados, classificando por nível de severidade e potenciais melhorias. Isto pode ser observado na segunda aba "ocorrências" do mesmo arquivo Google Sheets.
Conclusão
Os testes de interface interativa revelaram que, apesar do sucesso inicial no desenvolvimento dos protótipos, a interface enfrentou dificuldades em termos de usabilidade e não atendeu plenamente às heurísticas de Nielsen. Isso sublinha a necessidade de melhorias focadas em tornar a interface responsiva. Para futuros desenvolvimentos, recomenda-se revisar os elementos problemáticos com base no feedback dos usuários e realizar testes adicionais para garantir que a interface seja eficaz e satisfatória para o controle operacional do robô.
Proposta de Melhoria
Melhorar Bateria
Durante os testes, constatou-se que a bateria atual de 1800mAh não sustenta a operação do robô pelo período desejado de quatro horas. Através de análises comparativas e testes de desempenho, identificou-se que uma bateria de 2200mAh é capaz de atender a necessidade de maior autonomia. A substituição proposta visa não apenas alcançar as quatro horas de operação contínua mas também aumentar a confiabilidade do robô durante operações prolongadas, otimizando a eficiência operacional.
Melhoria na Interface do Usuário
A avaliação da interface atual revelou falhas no cumprimento das heurísticas de Nielsen, principalmente relacionadas à visibilidade do sistema e feedback ao usuário. Para melhorar a interação, propõe-se centralizar os pop-ups de alerta, garantindo que eles captem eficientemente a atenção do usuário, além de implementar um design responsivo para adaptar a interface a diferentes dispositivos. Estas mudanças são esperadas para facilitar o entendimento e controle do robô pelos usuários, reduzindo o tempo de aprendizado e aumentando a satisfação e eficiência nas operações.
Melhoria na latência
Nota-se que há uma diferença muito grande na latência em:
- Rodar o WebSocket em outro computador ao invés de diretamente no robô;
- Calcular a latência no frontend ao invés de diretamente no robô;
Por isso, foram implementadas duas mudanças, de rodar o websocket em outro computador:
ros2 launch rosbridge_server rosbridge_websocket_launch.xml # agora rodamos e outro computador
E também será retirado o cálculo da latência do robô para o frontend. No arquivo sender.py do robô, agora é enviado um timestamp para ser calculado no frontend.
def timer_callback(self):
ret, frame = self.cap.read()
if ret:
_, buffer = cv2.imencode('.jpg', frame)
msg = CompressedImage()
msg.format = "jpeg"
msg.data = buffer.tobytes()
# Define na mensagem o timestamp atual
msg.header = Header()
msg.header.stamp = self.get_clock().now().to_msg()
msg.header.frame_id = "camera_frame"
self.publisher_.publish(msg)
Já no frontend, recebe-se a mensagem e calcula-se a diferença:
videoTopic.subscribe((message) => {
const base64Data = message.data;
setVideoSrc('data:image/jpeg;base64,' + base64Data);
console.log('Received message header:', message.header);
if (message.header && message.header.stamp) {
const { sec, nanosec } = message.header.stamp;
console.log('sec:', sec, 'nanosec:', nanosec);
if (typeof sec === 'number' && typeof nanosec === 'number') {
const now = new Date().getTime() / 1000; // Tempo atual em segundos
const rosTimeInSeconds = sec + nanosec * 1e-9; // Tempo vindo do ROS em segundos
const latency = now - rosTimeInSeconds; // Calcula a latencia com a diferença
setLatencyData(latency.toFixed(3) + ' seconds');
} else {
console.error('Invalid or missing timestamp data');
setLatencyData('Invalid timestamp data');
}
} else {
console.error('No timestamp data available in the message header');
setLatencyData('Missing timestamp data');
}
});
O resultado alcançado superou a métrica estabelecida anteriormente, que previa uma latência máxima de 150ms, apresentando variações de apenas 30ms para mais ou menos. A latência foi drasticamente reduzida, e tanto o envio dos dados da câmera e lidar quanto a troca das mensagens de movimentação ocorrem agora muito mais rapidamente.