Metodologia da Sprint 2
A metodologia de projeto utilizada nesta Sprint 2 se concentrou na documentação meticulosa e no registro de cada etapa do desenvolvimento, aspectos cruciais para a execução bem-sucedida de uma metodologia ágil. Essa abordagem iterativa é fundamental porque facilita a adaptação e revisão do projeto conforme novas informações e desafios surgem ao longo da sprint. Nesta fase, o foco foi estabelecer e programar os movimentos básicos do robô TurtleBot3, teleoperado por uma interface gráfica simples em uma rede local, permitindo uma integração contínua e ajustes rápidos, essenciais para o sucesso em um ambiente de desenvolvimento ágil.
Movimentação do robô
A movimentação teleoperada do robô TurtleBot3 constitui a base para o desenvolvimento do projeto, pois é o primeiro passo para uma interação efetiva entre o usuário e o robô em um ambiente controlado. Esta sprint focou no desenvolvimento de uma aplicação web capaz de se comunicar com o robô e controlar seus movimentos básicos. A aplicação foi projetada para enviar comandos ao robô, que, após configurado conforme instruções disponíveis aqui, podia ser acessado e controlado via SSH.
Para tal, primeiramente foi necessário realizar a configuração do Turtlebot conforme é explicado aqui. Ao finalizar essa configuração, é possível acessar o terminal do robô e mandá-lo executar algumas coisas por ssh usando o comando ssh -p <porta> <nome de usuário>@<endereço IP> e digitando a senha. Para realizar tal, ambos o robô e o computador precisam estar na mesma rede.
Com o terminal do robô aberto no computador, deve-se executar o comando ros2 launch turtlebot3_bringup robot.launch.py nele. Esse é um comando padrão que vem ao baixar o turtlebot3, que irá inicializar e fazer com que o robô "escute" os comandos que forem publicados na mesma rede. Com isso, será possível realizar a comunicação via tópico e nós com o robô. Para saber mais sobre a comunicação, visualizar esse link
Além disso, deve ser configurado, ainda no terminal do robô, o ROS_DOMAIN_ID, o qual é uma variável de ambiente que permite a comunicação entre dispositivos apenas para os que possuem o mesmo domínio. Então, em outra aba do terminal, foram executados os comandos echo 'export ROS_DOMAIN_ID=<Valor-numérico-de-0-a-232> >> ~/.bashrc e source ~/.bashrc. Nesse caso, o valor numérico escolhido foi o 231, sendo substituído onde está escrito <Valor-numérico-de-0-a-232>. O mesmo comando foi executado no terminal do computador, e, partir de agora, tudo é executado no mesmo.
Após isso, foi criado um workspace para acomodar o pacote que se chama robot_navigation, onde estão os scripts que mandam as informações para o robô. Para isso, foi utilizado o seguinte passo a passo:
mkdir -p workspace/srccd workspace/srcros2 pkg create --build-type ament_python robot_navigation
Depois, algumas mudanças foram necessárias, como por exemplo editar o arquivo package.xml, alterando a descrição, licença, distribuidor e versão. Ademais, foi necessário adicionar essas linhas de código: <exec_depend>rclpy</exec_depend> <exec_depend>std_msgs</exec_depend>, as quais são depenências de execução do rclpy e std_msgs. Além disso, também foi preciso modificar o arquivo setup.py, na parte de entry_points, adicionando na lista (que até então ainda estava vazia) a estrutura "< nome do comando > = < nome do pacote > . < nome do arquivo executável > : < função principal, nesse caso a main >.
Após essas mudanças, criou-se um script chamado de run.sh, para rodar o projeto, o qual é responsável por verificar a existência do Flask, pacote Python necessário para rodar a aplicação. Sendo assim, o script verifica a existência dele na máquina e adiciona ao ROS, o qual não possui esse pacote. Por fim, é realizada a build do pacote ROS e sua execução. Para que o script pudesse ser rodado, deve-se executar o comando chmod +x filename.sh, para permitir ser um executável. Por fim, ele é executado ./run.sh, estando dentro da pasta workspace, assim finalizando assim a estruturação do workspace e do pacote.
Como foi citado, para definir um entry_point, ou seja, o que é executado ao rodar o pacote, foi necessário citar um arquivo executável e uma função dentro dele. Esse arquivo, nesse caso, encontra-se em src/workspace/src/robot_navigation, e se chama bot.py.
Foi nesse arquivo que foi definido o publisher, ou seja, os inputs que estão sendo enviados, e que serão "ouvidos" pelo robô, que é nosso subscriber.
A interface gráfica controlada por botões na tela permite que sinais sejam enviados para o Backend em Flask, uma escolha baseada na familiaridade do grupo e na facilidade de implementação com a programação dos pacotes ROS utilizados. O backend, por sua vez, aciona funções publisher que enviam um tópico para o subscriber rodando no robô, que executa os movimentos requisitados. Atualmente, o robô realiza movimentos como andar para frente, para trás, virar à esquerda, à direita, girar em torno do próprio eixo e fazer curvas suaves. Há também uma função de emergência que interrompe todas as operações para garantir segurança (kill button).
Para mais detalhes do código da aplicação, acesse aqui.
Interface de Usuário
Pensando no melhor desenvolvimento das funcionalidades de movimentação e comunicação com o robô, foi decidido desenvolver uma interface gráfica mais simples, se assemelhando a um wireframe, desenvolvido com HTML e CSS simples. Essas tecnologias foram escolhidas pela simplicidade de uso e implementação.
Houve a possibilidade de fazer interface por linha de comando, no entanto, foi escolhida uma interface gráfica, ainda que simples, e foram adicionadas as funcionalidades previstas no wireframe, desenvolvido no Figma(link do Figma), de modo a validar a usabilidade com o parceiro e as funcionalidades precistas e esperadas.
Interface de controle
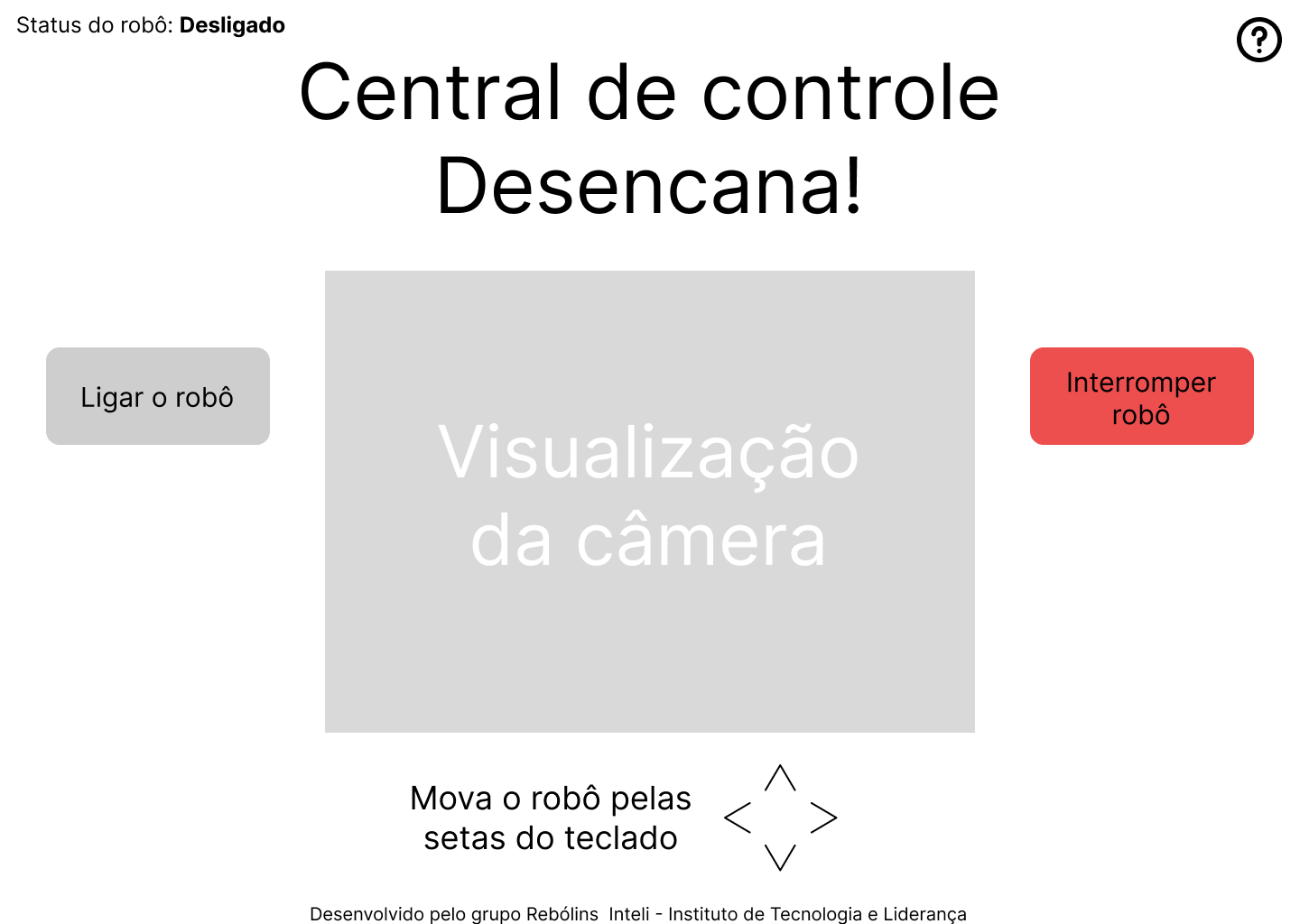
Fonte: Elaborado pela equipe Rebólins
No canto superior esquerdo da tela, o status atual do robô é claramente exibido, podendo estar "Desligado" — indicando que o robô não está em operação — ou "Ligado", que mostra que o robô está ativo. A interface principal é organizada com dois botões proeminentes: um botão cinza e inativo à esquerda para ligar o robô, e um botão vermelho à direita, que funciona como um botão de emergência para interromper as operações do robô se necessário, com sua cor destacando sua importância.
No centro da tela, há uma área dedicada para a visualização da câmera do robô, permitindo que o operador monitore as ações do robô em tempo real. Instruções logo abaixo mostram como mover o robô usando as setas do teclado, oferecendo controle remoto efetivo e direto.
A parte inferior da tela reconhece o "grupo Rebôlins Inteli - Instituto de Tecnologia e Liderança" como os desenvolvedores da interface, destacando a colaboração na criação desta ferramenta essencial. A combinação de simplicidade e funcionalidade faz desta interface uma solução prática e acessível para a gestão remota do robô.
Por fim, um ícone de ponto de interrogação no canto superior direito serve como um atalho para o menu de ajuda, onde os usuários podem encontrar informações adicionais sobre a operação da interface e do robô.
A interface de usuário foi desenvolvida utilizando um html e css simples, visando criar uma interface intuitiva e de fácil manuseio. O código foi organizado para facilitar a manutenção e a adição de novas funcionalidades no futuro. Além disso, foi utilizado o javascript para a implementação de funcionalidades interativas, como o controle remoto do robô por meio das teclas do teclado.