Controle e Streaming
Interface de Controle
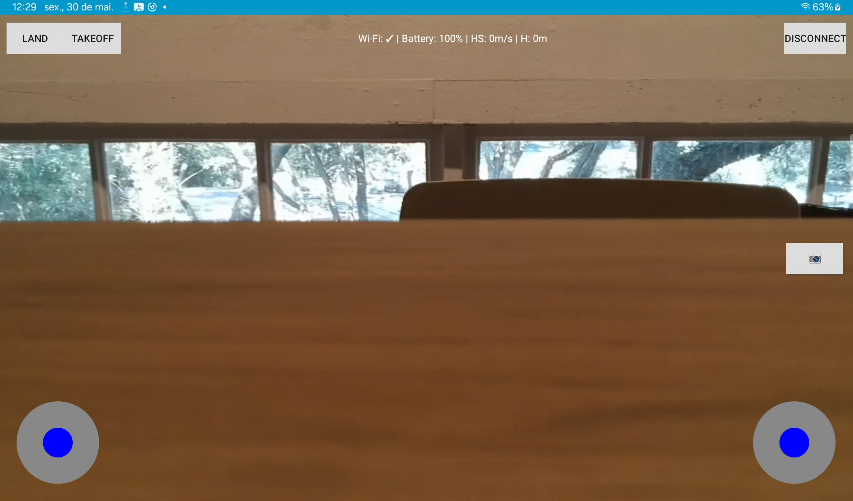
Ao se conectar ao drone, o usuário é levado para a tela principal de controle. Essa interface contém:
- Vídeo ao vivo do drone em tempo real (
SurfaceView). - Dois joysticks virtuais para movimentação e rotação.
- Botões de decolagem (
Takeoff), pouso (Land), desconexão (Disconnect) e um botão de captura (Photo) ainda não funcional. - Indicador de status no topo com informações como:
- Estado da conexão Wi-Fi com o drone.
- Nível atual da bateria.
- Altura (H) e velocidade horizontal (HS) do voo.
Screenshot tirada em um tablet.
Estrutura do Código
A organização segue uma arquitetura modular e clara:
tellocontroller: Lida com as atividades principais, envio de comandos e recepção de vídeo.ui.theme: Contém o joystick personalizado usado na interface de controle.res/layout: Define a interface gráfica em XML.
Inicialização da Conexão
Na MainActivity, ao clicar em Connect to Tello, o app:
- Envia o comando
"command"para ativar o modo SDK do drone. - Envia
"streamon"para iniciar a transmissão de vídeo. - Inicia a
ControlActivityapós a confirmação de conexão.
TelloCommandSender.sendCommand("command")
Thread.sleep(100)
TelloCommandSender.sendCommand("streamon")
Em caso de falha, é exibida uma mensagem de erro por Toast.
Controle com Joysticks
Na ControlActivity, dois joysticks (JoystickView) controlam o drone:
- Joystick esquerdo: altura (vertical) e rotação (yaw).
- Joystick direito: movimento para frente/trás e lateral.
A cada 100ms, o app envia comandos RC no formato:
rc <left_right> <forward_back> <up_down> <yaw>
Botões adicionais:
- Takeoff: envia
takeoff. - Land: envia
land. - Disconnect: pousa o drone, encerra o vídeo e retorna à tela inicial.
- Photo: presente visualmente, será implementado em breve.
Exibição do Vídeo
A classe TelloVideoReceiver trata a recepção e decodificação do vídeo transmitido pelo drone:
- Recebe pacotes UDP com dados codificados em H.264.
- Detecta NAL units para configurar o decoder (
MediaCodec). - Exibe os frames decodificados no
SurfaceView.
Trecho de configuração do codec:
val format = MediaFormat.createVideoFormat("video/avc", 960, 720)
format.setByteBuffer("csd-0", ByteBuffer.wrap(sps))
format.setByteBuffer("csd-1", ByteBuffer.wrap(pps))
decoder.configure(format, surface, null, 0)
Há também um mecanismo automático de recuperação após vários frames corrompidos.
Indicadores de Status
Na parte superior da tela de controle, o app exibe:
- Wi-Fi: status de conexão com o drone.
- Battery: porcentagem da bateria do Tello.
- HS (Horizontal Speed): velocidade horizontal atual.
- H (Height): altura atual do drone.
Esses dados são atualizados conforme a transmissão e refletem informações cruciais durante o voo.
JoystickView Personalizado
O componente JoystickView é uma View customizada que:
- Detecta o toque e calcula a posição relativa do usuário.
- Normaliza os valores de entrada entre -1 e 1.
- Atualiza a posição do controle visualmente.
- Retorna automaticamente ao centro ao soltar o toque.
Funcionalidades Futuras
As próximas sprints incluem:
- Implementação completa da captura de fotos a partir do feed de vídeo.
- Melhorias da Interface/UX.