Durante esta sprint
Mudanças:
Durante essa Sprint algumas mudanças foram feitas no processo de execução do projeto, tanto para Linux/MacOS, quanto para Windws.
Requisições:
Tendo em mente que o projeto roda em cima da linguagem Python, é preciso que o computador a tenha instalada, na sua versao 3.12.3 .
Os systemas operacionais suportados nesse projeto são:
- Windows 10/11
Intalações de arquivos
Python
Caso o computador ainda não possuia Python, acesse aqui: Instladaor Python.
Em seguida, acesse o gerenciador de arquivos, na pasta de Downloads, e execute o arquivo.
Figura 1: Arquivo executor
Fonte: Elaborado pela equipe Cardio Bot
Se o computador já possuir a linguágem python instalada, aparecerá a janela a baixo.
Nesse caso, vá direto para o tópico de Execução do projeto
Figura 2: Tela - Pytho já instalado
Fonte: Elaborado pela equipe Cardio Bot
Se esse não for o caso, a seguinte janela irá aparecer, clique na área Install Now, se o sistema estiver em inglês, Intale Agora, para o sistema em português.
Figura 3: Tela - Intalando Python
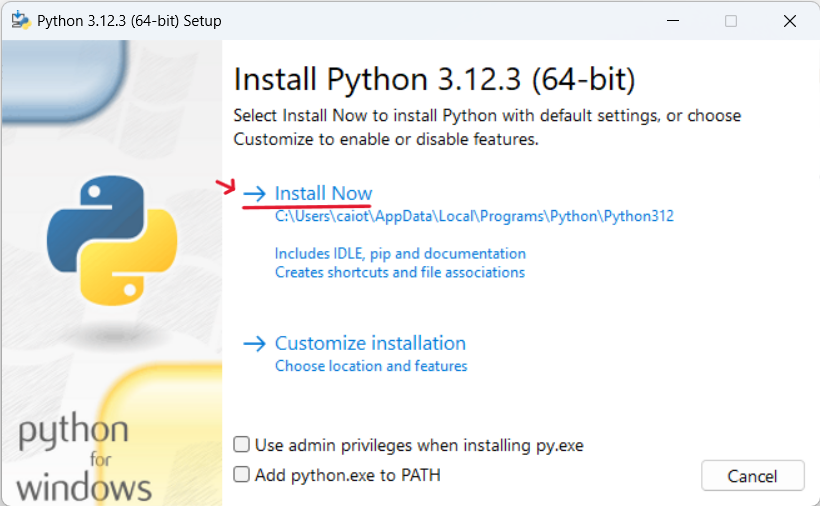
Fonte: Elaborado pela equipe Cardio Bot
Acessando o seguinte link, será feito o download do zip do projeto: 2024-T0008-EC05-G05-5.0.0
Agora abra o gerenciador de arquivos para, e extraia a pasta, para fazer isso, clique com o potão direito do mouse em cima do nome da pasta e aperte em extrair tudo:
Raspberry Pico (Sensor de Distância)
Para utilizar o sensor de distância, siga os passos abaixo:
Primeiro Passo: Montar o circuito do Raspberry Pico
A seguir é apresentado o esquema elétrico do circuito do Raspberry Pico:
Figura 4 - Esquema elétrico dos periféricos
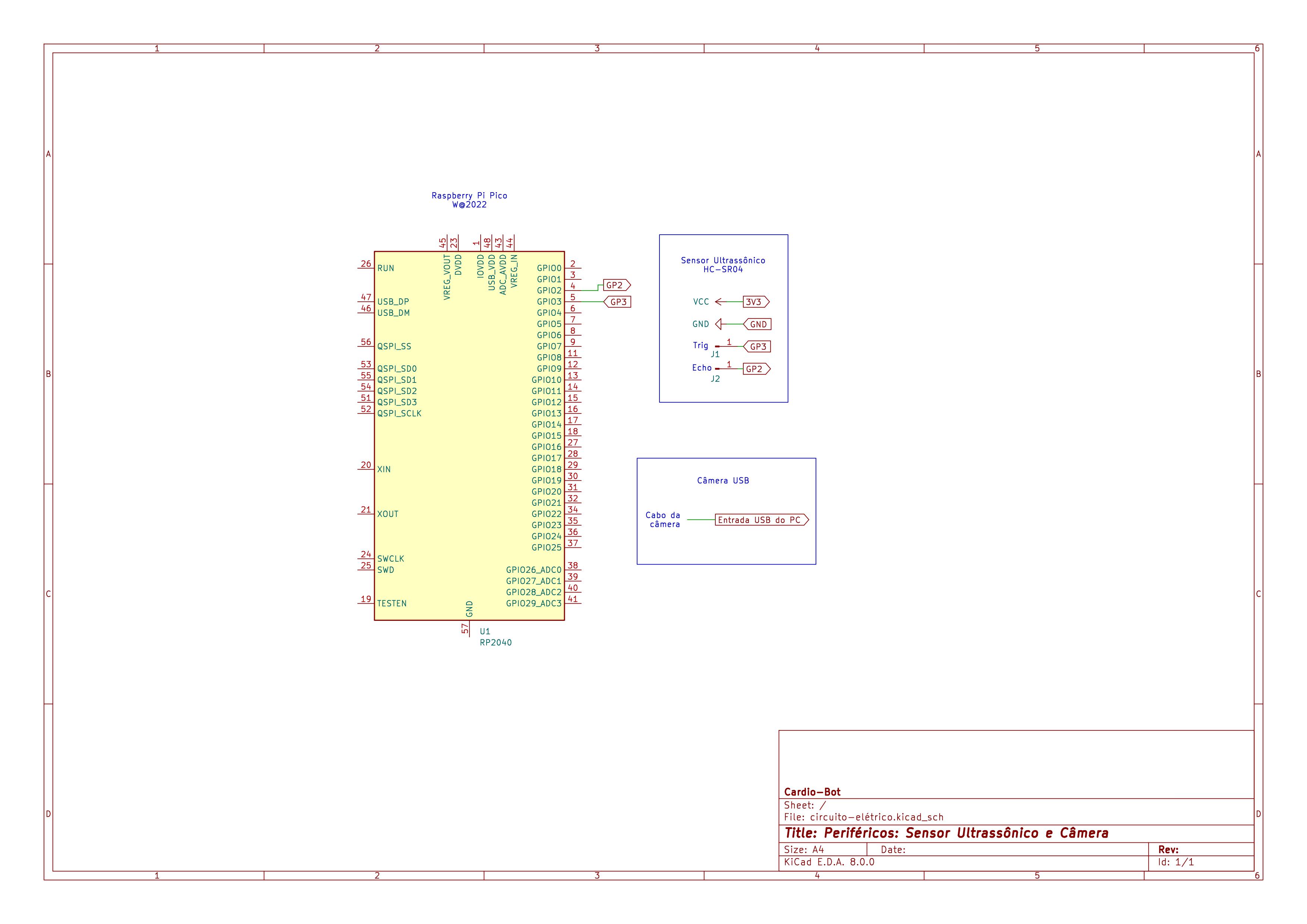
Fonte: Elaborado pela equipe Cardio-Bot
Segundo Passo: Instalar o firmware no Raspberry Pico
Para instalar o firmware no Raspberry Pico, siga os passos abaixo:
- Instale o Thonny IDE.
- Faça o setup inicial do Raspberry Pico, seguindo o tutorial oficial.
- Instale o MicroPython.
- Abra o Thonny IDE e conecte o Raspberry Pico ao computador.
- Vá até a pasta
src/CodigoRasp/UltraSonico.pye copie o código. - Cole o código no Thonny IDE, em um arquivo chamdado
main.pye substitua os valores deSSIDePASSWORDpelas credenciais da sua rede Wi-Fi e o valor deip_servidorpelo IPV4 do seu computador. - Clqiue em
Runpara executar o código.
Nos estamos utilizando o MicroPython para programar o Raspberry Pico.
Após seguir todos os passos, o sensor de distância estará pronto para ser utilizado e pode ser ligado utilizando alguma fonte de energia, como um power bank.
IMPORTANTE - Para que a solução funcione corretamente, é necessário que o Raspberry Pico esteja ligado e o sensor de distância esteja conectado ao Raspberry Pico. Além disso, é necessário que o robô esteja ligado e conectado ao computador.
Após seguir todos os passos, a solução estará pronta para ser utilizada.
Figura 5: Tela - Selecionar extração de arquivos
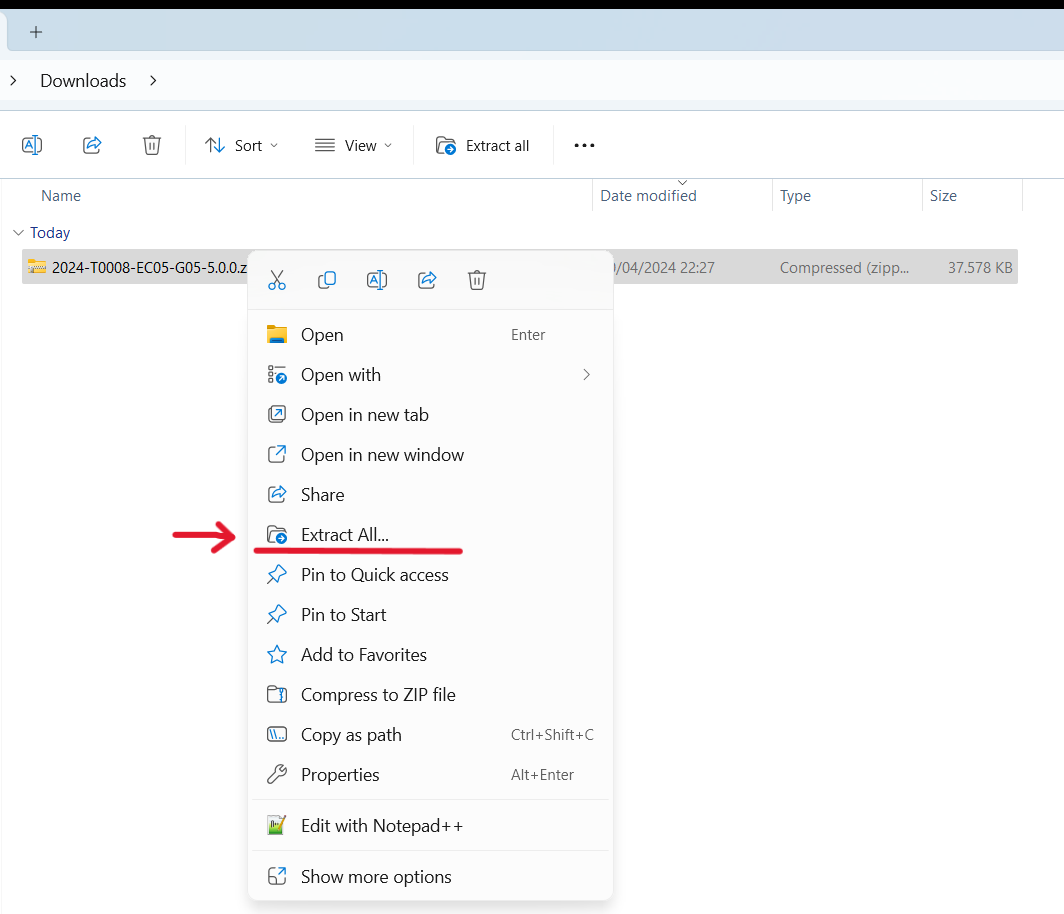
Fonte: Elaborado pela equipe Cardio Bot
Ao realizar essa etapa, aparecerá a tela de extração dos arquivos. Nela será preciso escolher a pasta de destino da extração e inicialinar a extração.
Para selecionar a pasta de destino, basta colocar a rota da pasta na barra superior, marcada de azul.
Já para executar, aperter Enter ou aperter em Extrair, marcado de vermelho.
Figura 6: Tela - Extraindo arquivos
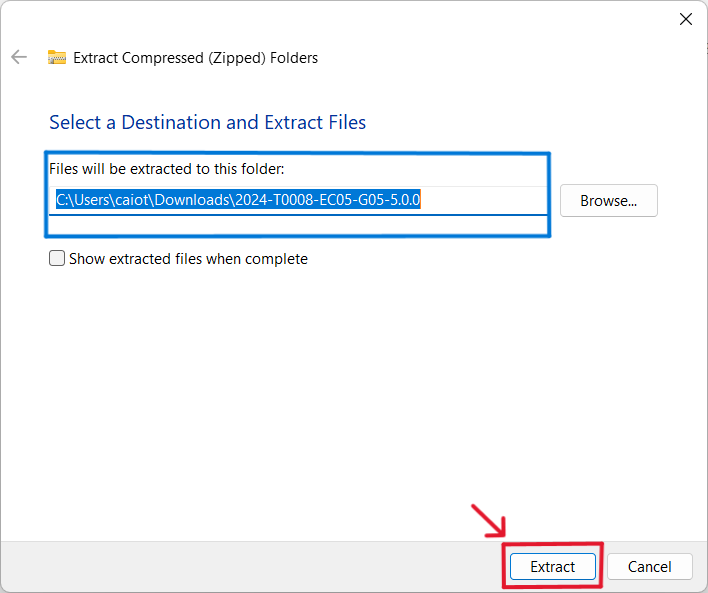
Fonte: Elaborado pela equipe Cardio Bot
Pronto, todos os arquivos foram instalados, agora será mostrada a execução do projeto.
Execução do projeto
Após isso, vá até o arquivo src/frontend/src/components/kit_description_popup/KitDescriptionPopup.js e substitua o valor de ip_servidor pelo IPV4 do seu computador. Isso vai fazer com que o frontend consiga se comunicar com o backend do robô e com o Raspberry Pico.
Em seguida, acesse a pasta que que foi feita a extração dos arquivos e nela clique com o botão direito do mouse e abra um terminal.
Figura 7: Tela - Acessando pasta do projeto
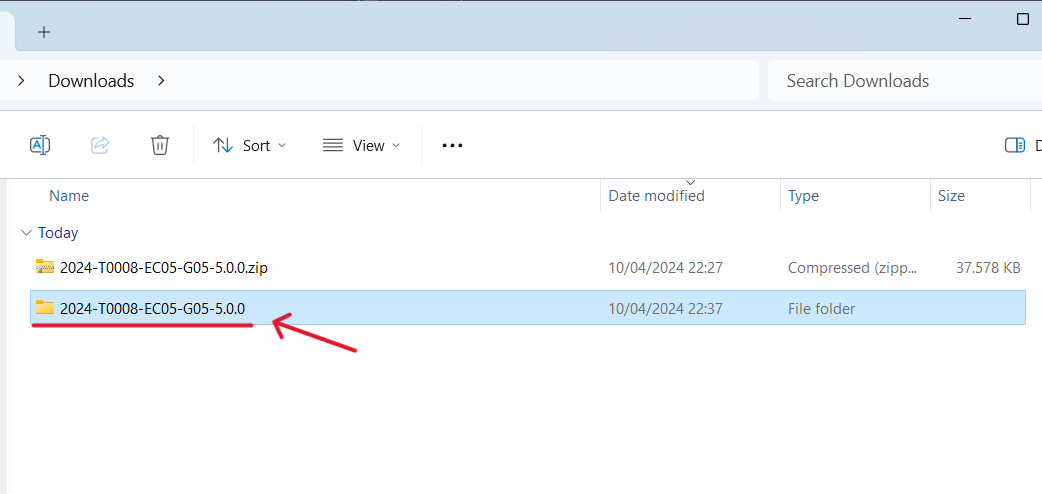
Fonte: Elaborado pela equipe Cardio Bot
Figura 8: Tela - Iniciando DMC
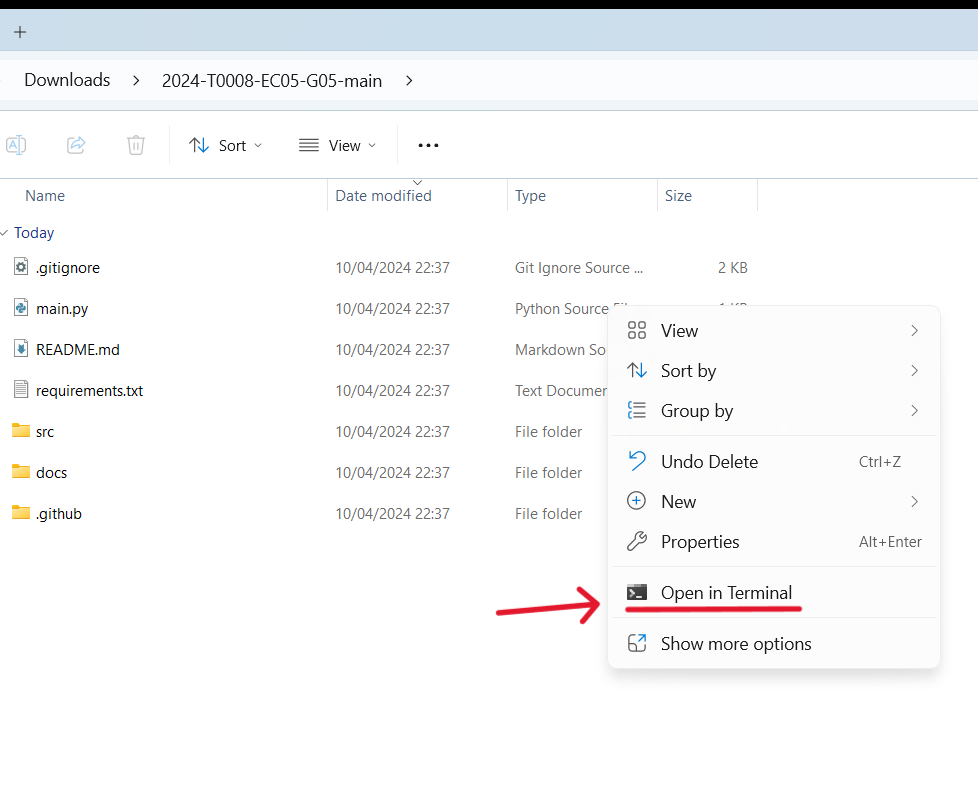
Fonte: Elaborado pela equipe Cardio Bot
Dentro do CMD, digite o comando abaixo e aperte Enter. Isso fará que mais 3 CMDs apareçam.
- O primeiro CMD executa o front-end;
- O segundo CMD executa a API do braço robótico;
- O terceiro CMD executa a API de estoque e logs do sistema;
python main.py