Instruções de Inicialização
Introdução
Este documento é crucial para qualquer usuário que deseje inicializar e operar eficientemente a Interface de Linha de Comando (CLI) e o sistema robótico associado. Contendo instruções detalhadas e meticulosas, ele serve como um guia fundamental para configurar corretamente ambos os componentes tecnológicos. Ao seguir este manual, espera-se que os sistemas operem com plena funcionalidade, otimizando sua performance operacional.
A aderência rigorosa aos procedimentos descritos é vital. Isso não apenas facilita uma configuração bem-sucedida, mas também previne possíveis falhas operacionais. A execução correta dessas etapas assegura que eventuais problemas sejam minimizados, permitindo que o usuário explore todo o potencial do sistema.
Portanto, é imprescindível seguir cuidadosamente cada passo apresentado neste documento. Fazer isso garantirá o melhor desempenho possível do equipamento, maximizando a eficiência e eficácia na utilização da CLI e do sistema robótico.
Versões das Bibliotecas Necessárias
Para evitar problemas de compatibilidade e garantir a integridade do ambiente de execução, é imperativo utilizar as versões das bibliotecas conforme listado abaixo
- ROS2:
humble - Python:
3.10.10 - Typer:
0.9.0 - Inquirer:
3.2.4
Preparação do Ambiente de Execução
Para garantir uma execução eficiente do software, é essencial preparar adequadamente o ambiente de execução. Isso evitará problemas e erros durante a operação do robô.
Configuração do Sistema Operacional
O software foi desenvolvido para ser executado especificamente no Ubuntu 22.04. Utilizar uma versão ou sistema operacional diferente pode resultar em falhas de execução.
Para checar sua versão atual do Ubuntu, digite no terminal o seguinte:
lsb_release -a
E veja se seguido na parte Description está Ubuntu 22.04.04 LTS, se não estiver, será necessário reinstalar o sistema operacional em sua correta versão. Se necessário, segue o link com a versão correta do Ubuntu
Verificação e Instalação das Dependências
Antes de prosseguir, é essencial verificar se as dependências principais estão corretamente instaladas em seu sistema. Utilize os comandos abaixo para confirmar as versões de Python e ROS2:
python3 --version
printenv ROS_DISTRO
Instalando Python
Se o Python não estiver presente em seu sistema, instale-o usando o comando:
sudo apt install python3
Sempre que utilizar o comando sudo em seu terminal, será necessário digitar a senha de seu usuário na máquina.
Instalando ROS2
Para a comunicação entre a interface de linha de comando (CLI) e o robô, será empregado o ROS2, uma escolha tecnológica estratégica que permite a transmissão eficiente de informações através de uma rede robusta. Este sistema é projetado para facilitar a interação entre dispositivos computacionais e máquinas autônomas, proporcionando uma plataforma confiável para o envio de comandos.
Para instalar o ROS2, caso ainda não esteja configurado, siga as instruções detalhadas disponíveis neste link.
Estabelecendo a Conexão de Rede
É crucial que seu computador esteja conectado à mesma rede Wi-Fi que o robô para permitir a comunicação.
Para conectar o robo na mesma rede em que você está conectado em sua máquina será necessário executar os seguintes passos:
Conectar a Raspberry Pi do robô em um monitor, teclado e mouse.
Após, entrar no Ubuntu deverá se conectar a rede desejada, após isto digite ifconfig no terminal para adquirir o IP.
Inicialização da CLI
A inicialização correta da Interface de Linha de Comando (CLI) é fundamental para o controle efetivo do robô e para a execução de comandos específicos do sistema. Para começar, siga estes passos detalhadamente para garantir que a CLI seja iniciada sem problemas:
Antes de executar os passos aqui ditos, entre no arquivo exec2_bash.sh ou exec2_zsh.sh e altere o SSH_HOSTNAME para o IP da Raspberry Pi adquirido após se conectar a rede desejada.
Configuração para o Bash
- Clonar o Repositório do Projeto: Abra um terminal e digite o seguinte comando para clonar o repositório do projeto para sua máquina local:
git clone https://github.com/Inteli-College/2024-1B-T08-EC06-G04.git
- Acessar o Diretório do Projeto: Navegue até o diretório do projeto utilizando o comando:
cd 2024-1B-T08-EC06-G04
- Instale venv em sua máquina: Instale a extensão de ambiente virtual do python 3.10:
sudo apt install python3.10-venv
- Execute o script de inicialização
Execute o seguinte código para o robô "escutar" os publishers feitos pela CLI:
Senha do SSH grupo412
ssh grupo4@10.128.0.9
Após, digite a senha
ros2 launch turtlebot3_bringup robot.launch.py
Em uma nova aba do terminal, continue com a execução do segundo script para abrir a interface CLI em sua máquina:
./exec_bash.sh
Configuração para o Zsh
Para usuários do Zsh, os comandos são ligeiramente diferentes:
- Clonar o Repositório do Projeto: Abra um terminal e digite o seguinte comando para clonar o repositório do projeto para sua máquina local:
git clone https://github.com/Inteli-College/2024-1B-T08-EC06-G04.git
- Acessar o Diretório do Projeto: Navegue até o diretório do projeto utilizando o comando:
cd 2024-1B-T08-EC06-G04
- Instale venv em sua máquina: Instale a extensão de ambiente virtual do python 3.10:
sudo apt install python3.10-venv
- Execute o script de inicialização Execute o seguinte código para o robô "escutar" os publishers feitos pela CLI:
Senha do SSH grupo412
ssh grupo4@10.128.0.9
Após, digite a senha
ros2 launch turtlebot3_bringup robot.launch.py
Em uma nova aba do terminal, continue com a execução do segundo script para abrir a interface CLI em sua máquina:
./exec_zsh.sh
Uma vez concluídos esses procedimentos, a Interface de Linha de Comando (CLI) estará totalmente operacional e configurada para facilitar a interação eficaz com o robô.
Operação da CLI
Após abrir a CLI, será deparado com a seguinte interface:

Contendo as seguintes opções: Teleoperação, Conectar, Desconectar, Para de Emergência, Sair
Para utilizar a CLI e escolher a opção desejada, usa-se as setas do teclado para cima e baixo afim de navegar e a tecla Enter para selecionar a opção desejada.
Segue abaixo a funcionalidade de cada um deles;
- Teleoperação: Após aberto, permite movimentar o robô com as teclas
W,A,S,Drespectivamente para frente, girar lado esquerdo, para trás, girar lado direto. Além disso, caso aperte a tecla"Espaço", o robô irá parar, a tecla"q"irá sair do modo de teleoperação e a tecla"b"irá matar o processo, afim de ser a "parada de emergência" do robô

-
Conectar: Para poder operar o robô na teleoperação é necessário conectar o mesmo, clicando na opção de
Conectar -
Desconectar: Após conectar e utilizar o robô, é possível escolher a opção
desconectarpara evitar o uso sem querer do robô -
Parada de emergência: Ao escolher a opção parada de emergência, não importará se estiver conectado, desconectado ou fora da interface de teleoperação, o robô irá parar o que ele está executando. Após será aberta uma nova interface de escolhas, onde será possível sair da CLI ou, iniciar o processo novamente, voltando a interface anterior. Segue abaixo está outra interface que é aberta ao escolher
Parada de Emergência:
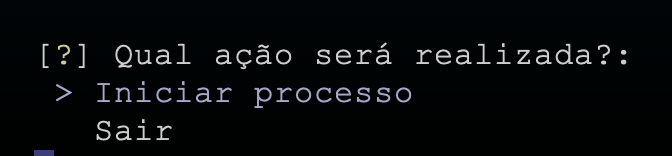
- Sair: Por fim, há também a opção Sair, onde se for clicada, apenas encerrará o processo da CLI
Se der algum problema relacionado a CLI e ela não fechar, digite a combinação de teclas CTRL + C repetidas vezes até finalizar completamente o processo