Por que escolhemos utilizar um periférico em nossa solução:
Os periféricos desempenham um papel crucial em nossa solução de IoT. Embora não sejam elementos essenciais para o funcionamento do sistema, eles contribuem significativamente para aumentar a qualidade e a eficiência das tarefas executadas. Ao integrar periféricos em nossa solução, elevamos a assertividade e garantimos um serviço de maior qualidade.
Qual periférico escolhemos e por que:
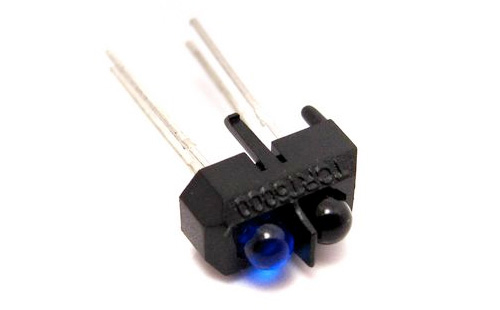
Optamos por integrar o sensor seguidor de linha TCRT5000, conhecido como sensor infravermelho, em nossa solução. Este periférico desempenha um papel fundamental ao garantir que o braço robótico execute suas tarefas com precisão. Ele atua como um mecanismo de verificação para a garra/ventosa acoplada à ponta do braço robótico. Se o sensor detectar a presença de material coletado, o processo continua normalmente. No entanto, caso não haja material identificado, o robô emite um aviso sonoro e executa a última tarefa atribuída a ele. Essa abordagem garante que os medicamentos sejam adequadamente coletados pela garra, minimizando possíveis divergências durante a montagem do kit médico.
Demonstração visual do sensor TCRT5000:
Quais componentes compõem nosso circuito junto ao periférico:
Para a construção do nosso circuito e utilização do periférico, estamos utilizando os seguintes componentes descritos na tabela abaixo:
Tabela 01 - Listagem dos componentes
| Componente | Quantidade |
|---|---|
| LED vermelho | 1 unidade |
| Sensor seguidor de linha TCRT5000 | 1 unidade |
| Resistor de 330 Ω | 3 unidades |
| Buzzer | 1 unidade |
| Jumper macho-macho | 11 unidades |
| Placa Raspberry Pi Pico | 1 unidade |
| Protoboard | 1 unidade |
Fonte: Elaboração própria
A partir desses componentes, é possível montar nosso circuito para a utilização do periférico TCRT5000.
Guia de montagem:
Placa que estamos utilizando para a construção do nosso circuito e seus respectivos pinos:

Representação do nosso circuito final para o periférico feito no software kicad:
Imagem 03 - Representação do software kicad
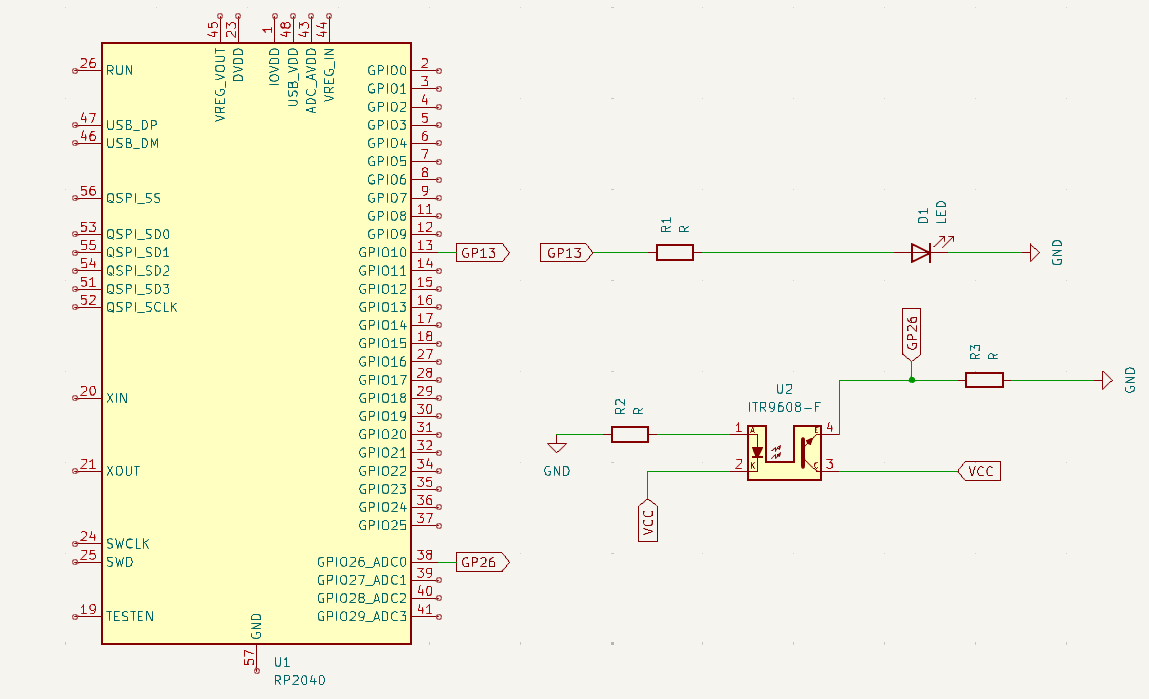
Fonte: Elaboração própia
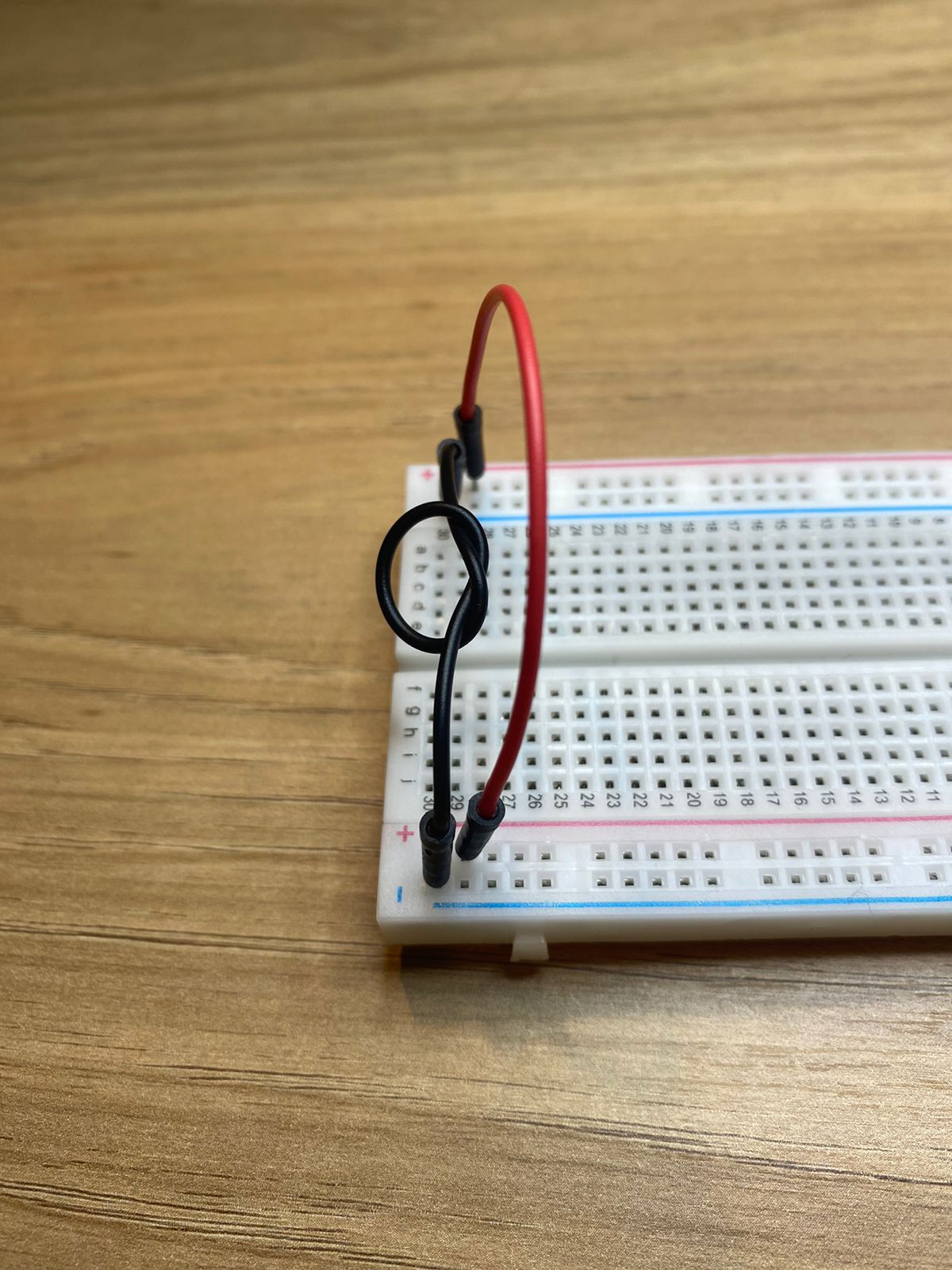
Realize a conexão entre o GND e a saída de 3V3 da placa na protoboard para poder energizar o circuito, estamos usando o pino 5 para a saída de energia e o pino 23 para o GND:
Imagem 04 - Conexão das saídas da placa a protoboard
Fonte: Elaboração própria
Agora, iremos ligar a o outro lado da placa, da seguinte maneira:
Imagem 05 - Conexão da protoboard inteira
Fonte: Elaboração própria
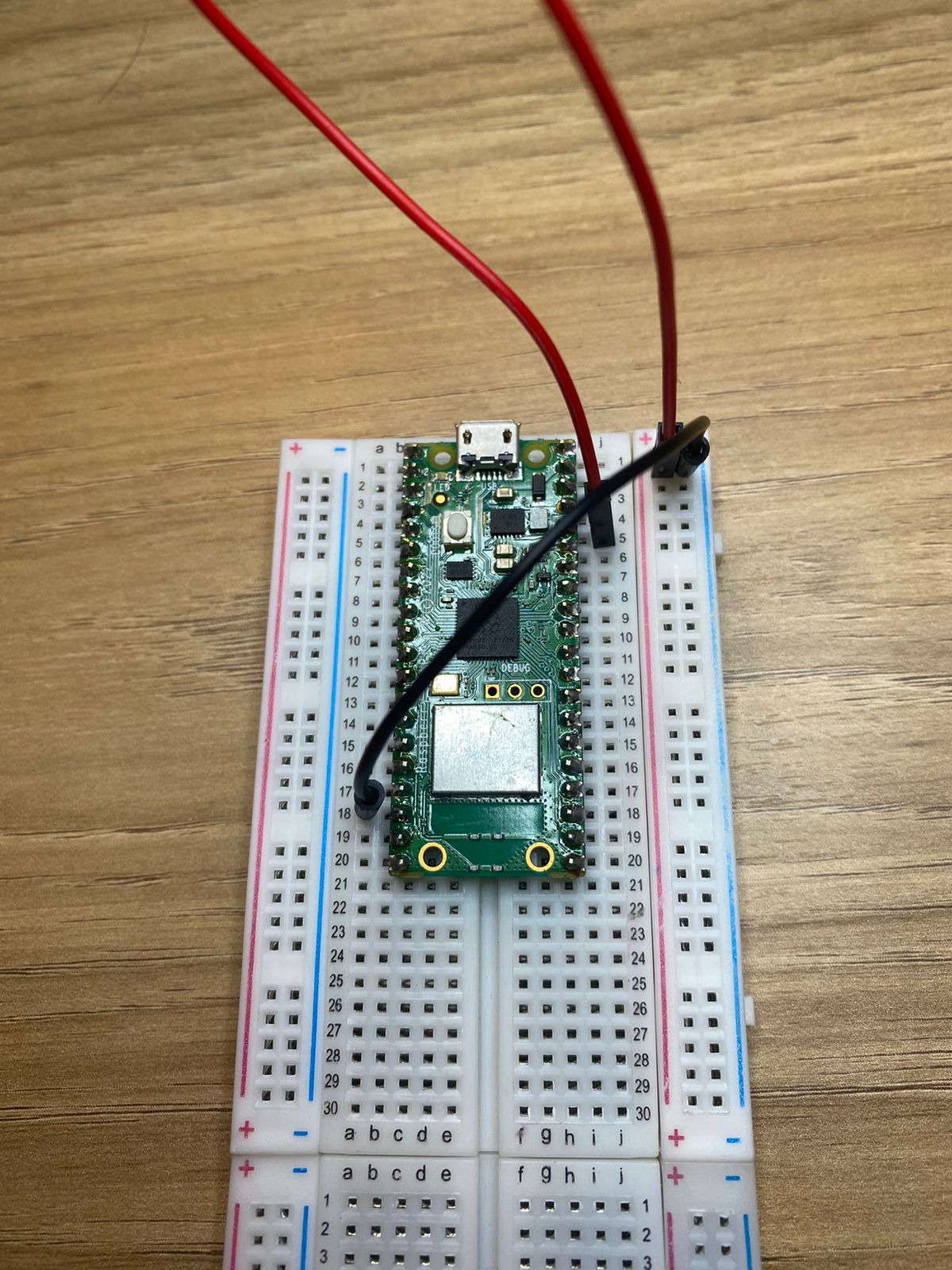
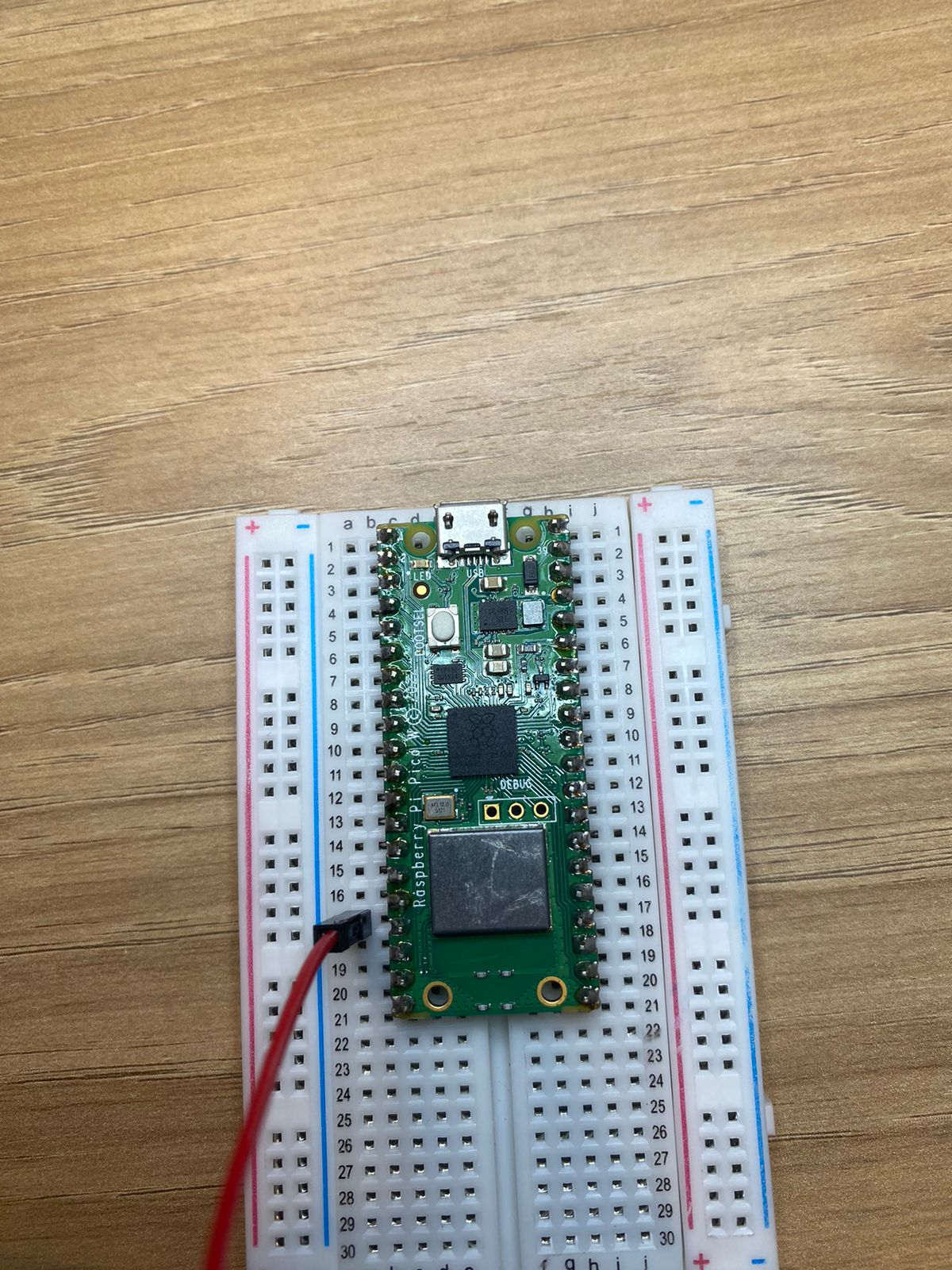
1. Agora que a protoboard está energizada corretamente, o primeiro passo para começar a construir nosso circuito é encaixar a placa Raspberry Pi Pico na protoboard com cuidado como mostra a imagem abaixo:
Imagem 06 - Montagem da Raspberry Pi Pico na protoboard
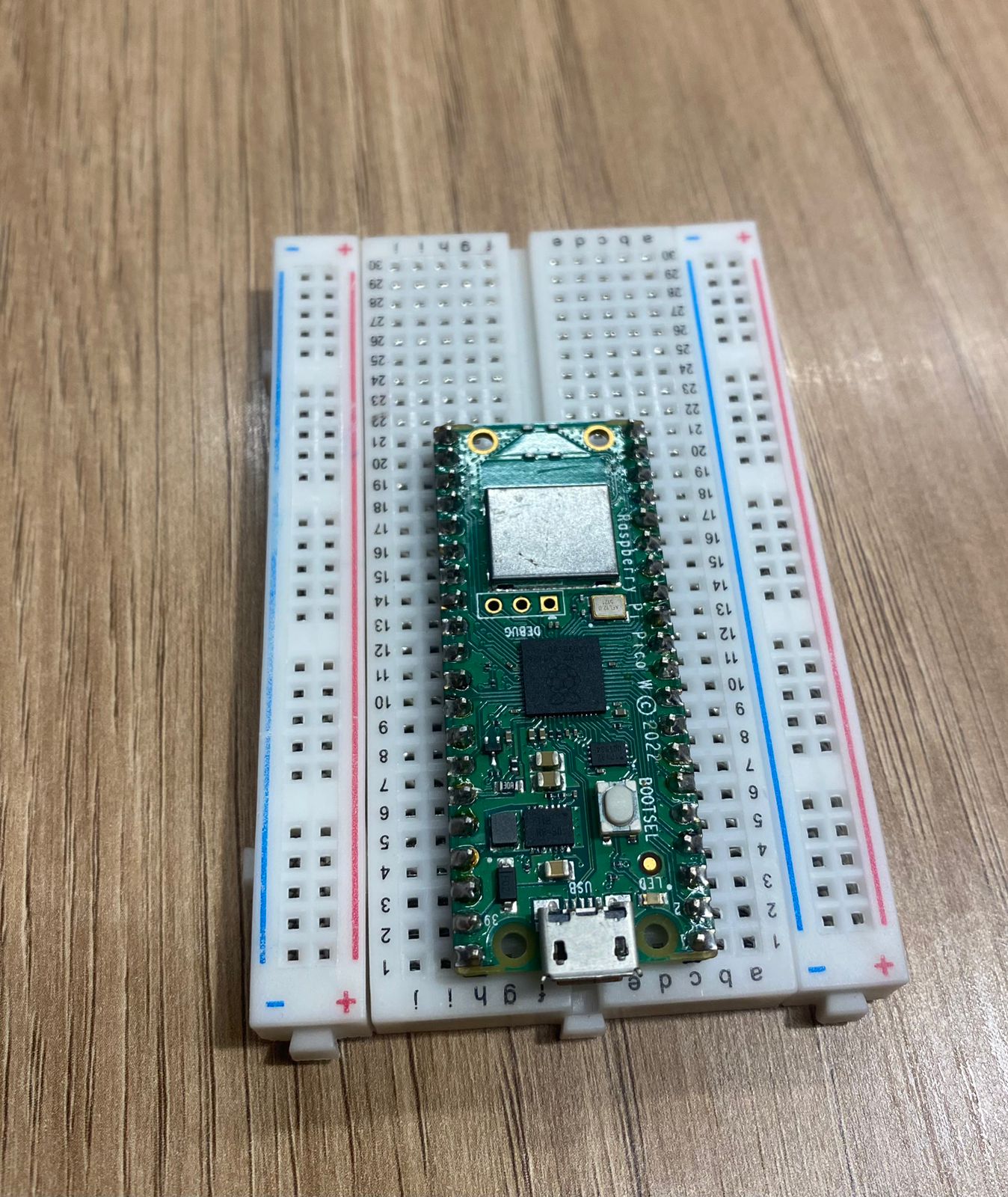
Fonte: Elaboração própria
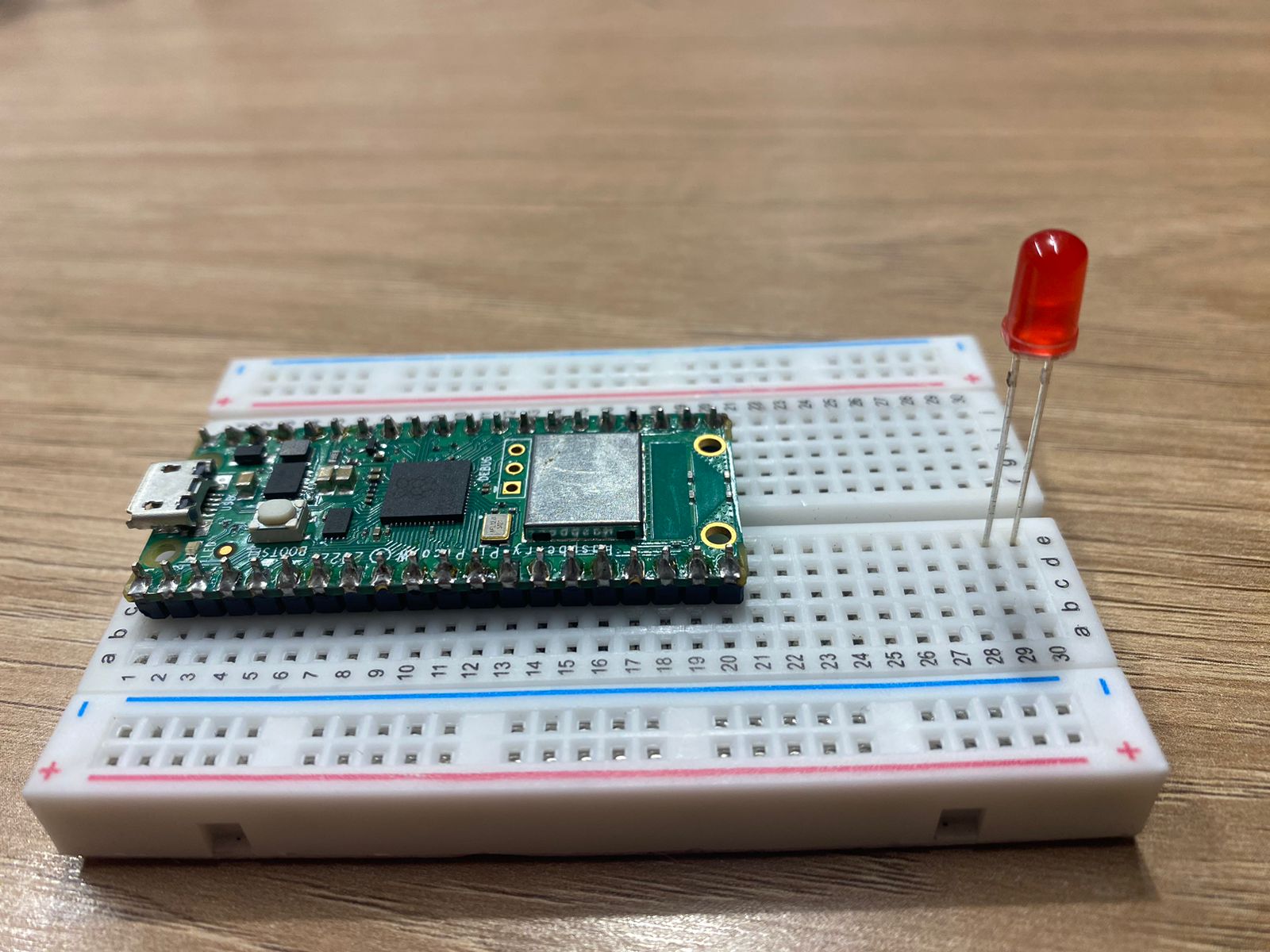
2. Agora iremos realizar a montagem do nosso LED vermelho ao circuito. Será necessário nesta etapa:
- 1 Resistor de 330 Ω
- 2 Jumpers macho-macho
Para melhor entendimento de como posicionar o LED em nossa protoboard, vamos visualizar como funcionam os terminais de um LED observando a seguinte imagem:
Imagem 07 - Exemplo de um LED e seus terminais

Fonte: Elaboração própria
Realize o posicionamento do LED na protoboard da seguinte maneira:
Imagem 08 - Posicionamento do LED na protoboard
Fonte: Elaboração própria
Conecte um dos terminais do resistor no terminal negativo do LED:
Imagem 09 - Conexão entre o terminal negativo do LED e o resistor
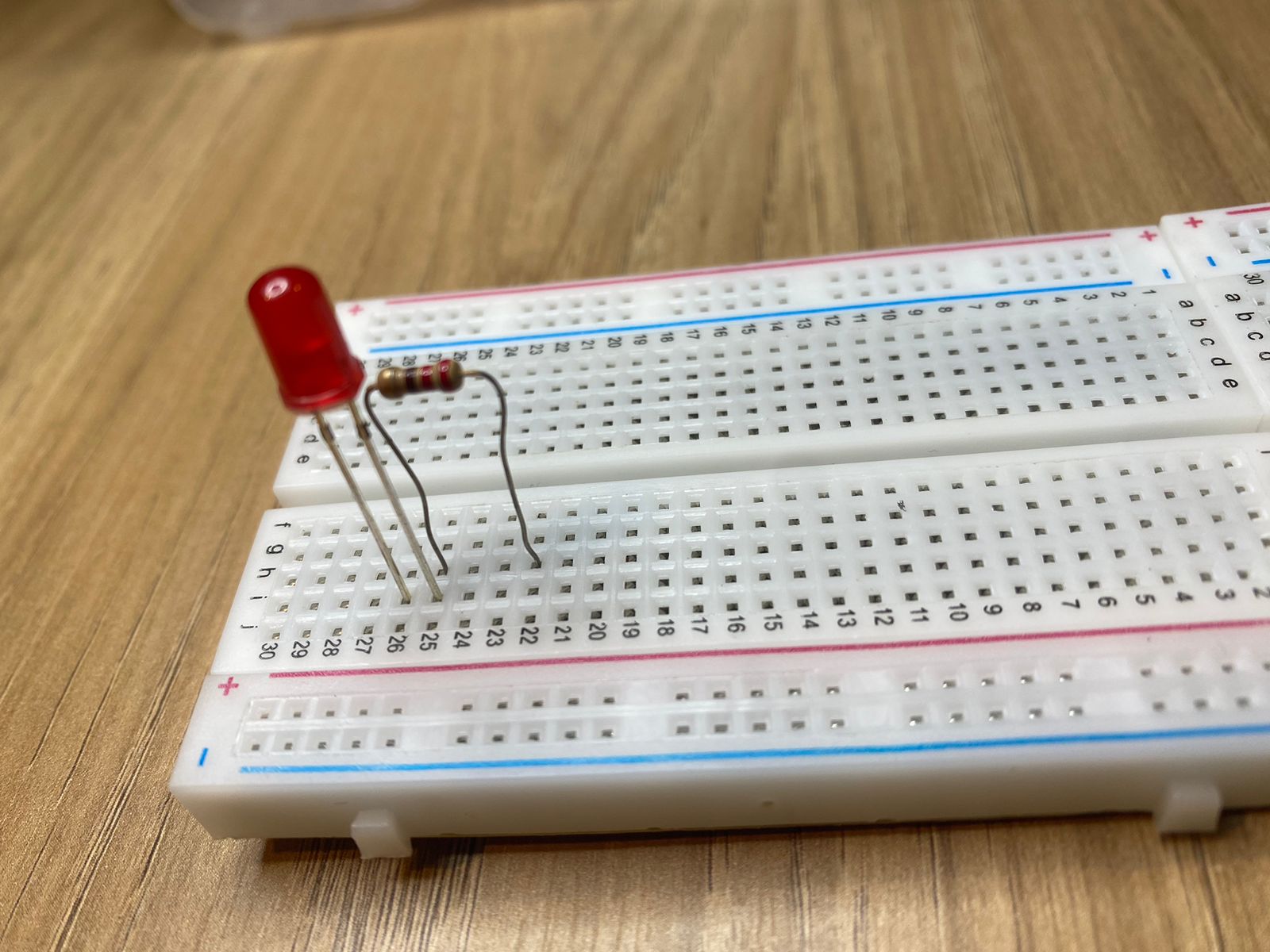
Fonte: Elaboração própria
Conecte o terminal negativo (cátodo) do LED ao GND (terra) da protoboard para fechar o circuito corretamente.
Imagem 10 - Conexão entre o terminal negativo do LED e o GND da protoboard
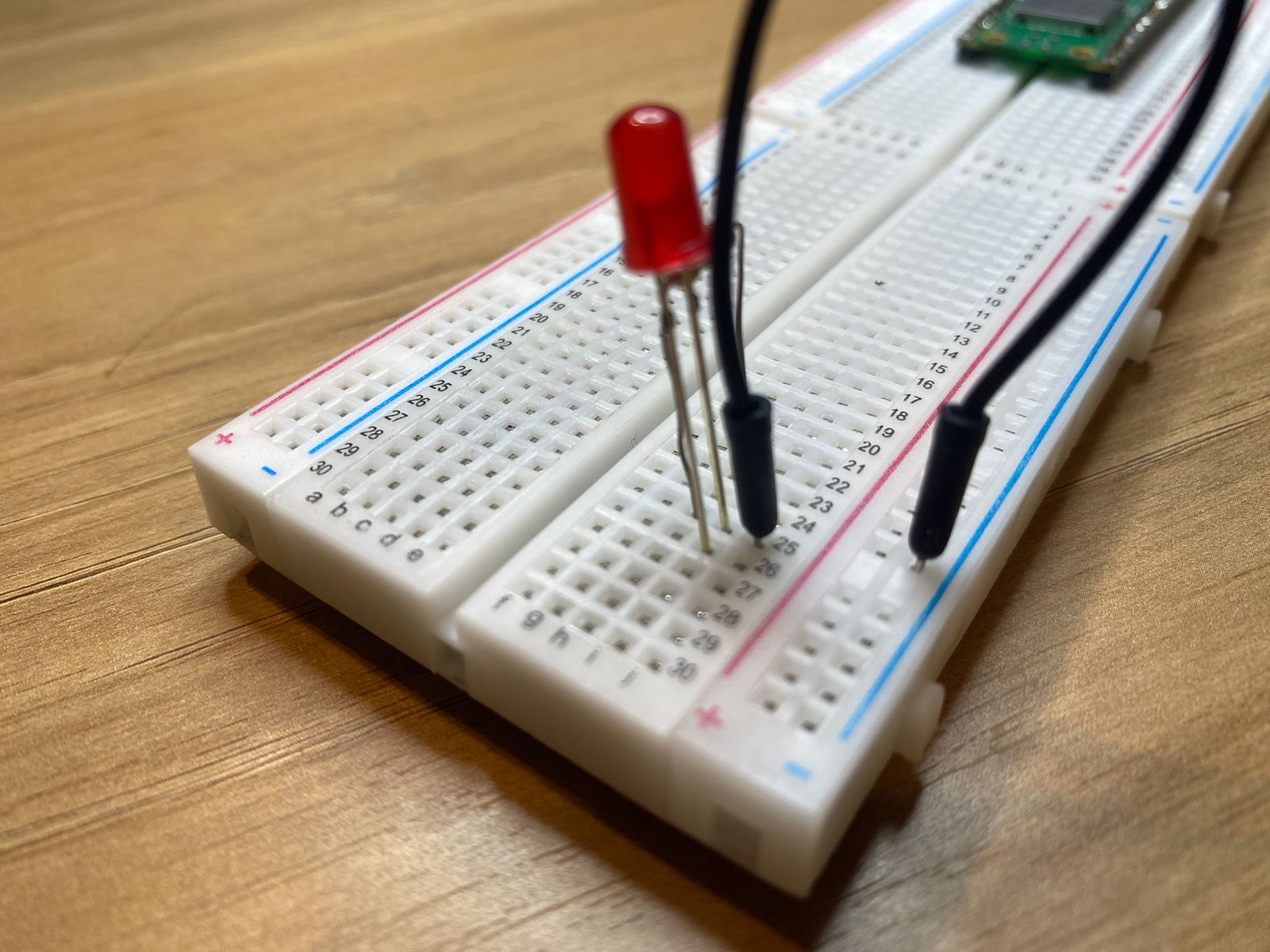
Fonte: Elaboração própria
Conecte o terminal positivo (ânodo) do LED a uma porta lógica específica da placa (por exemplo, GPIO pin 17), conforme indicado no seu código. Certifique-se de seguir as instruções de pinagem corretamente para evitar erros de conexão.
Imagem 11 - Conexão do terminal positivo do LED a uma porta lógica da placa
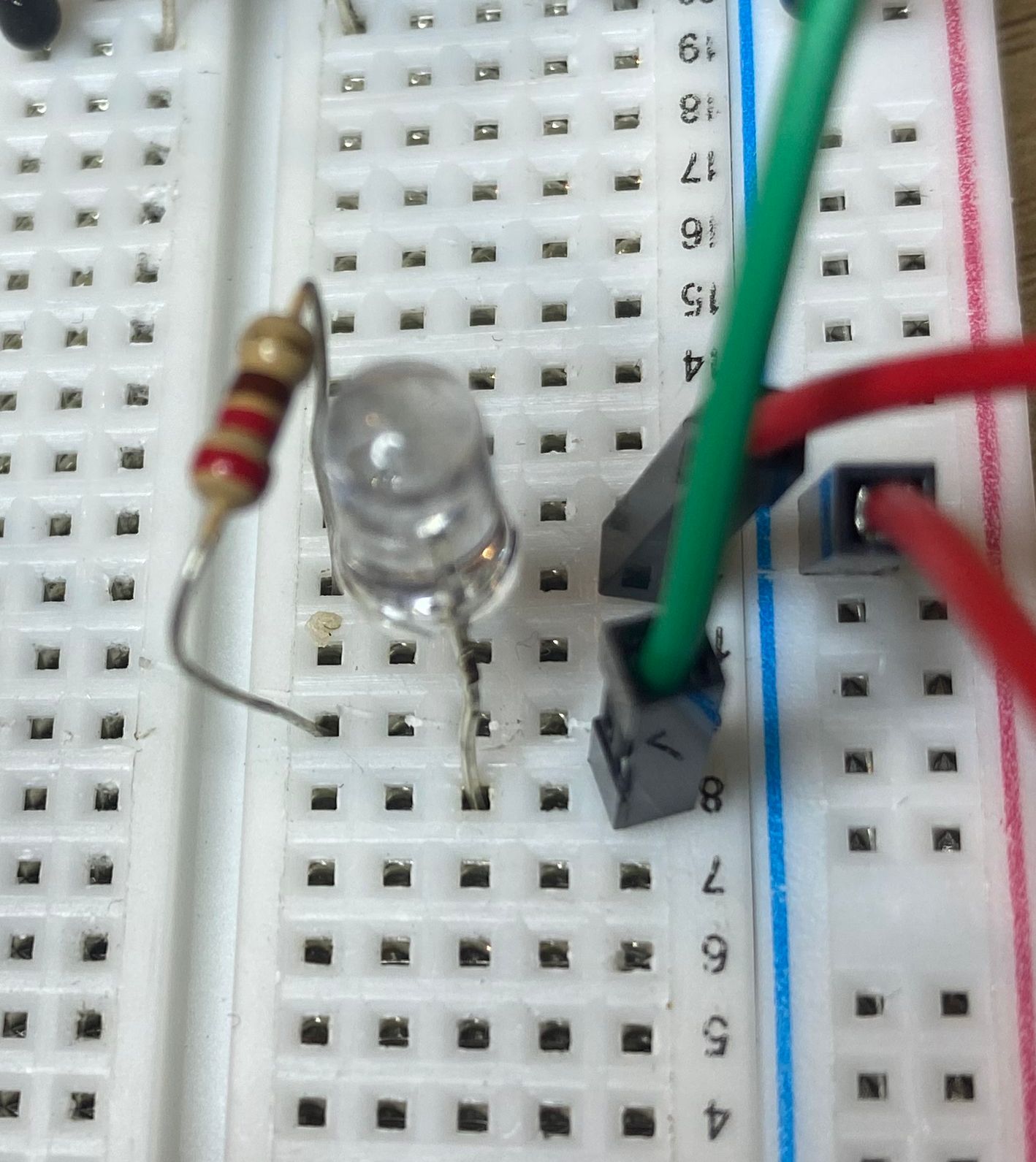
Fonte: Elaboração própria
Aqui estamos conectando o terminal positivo do LED a porta lógica da placa número xx:
Imagem 12 - Conexão do terminal positivo do LED a uma porta lógica da placa parte 2
Fonte: Elaboração própria
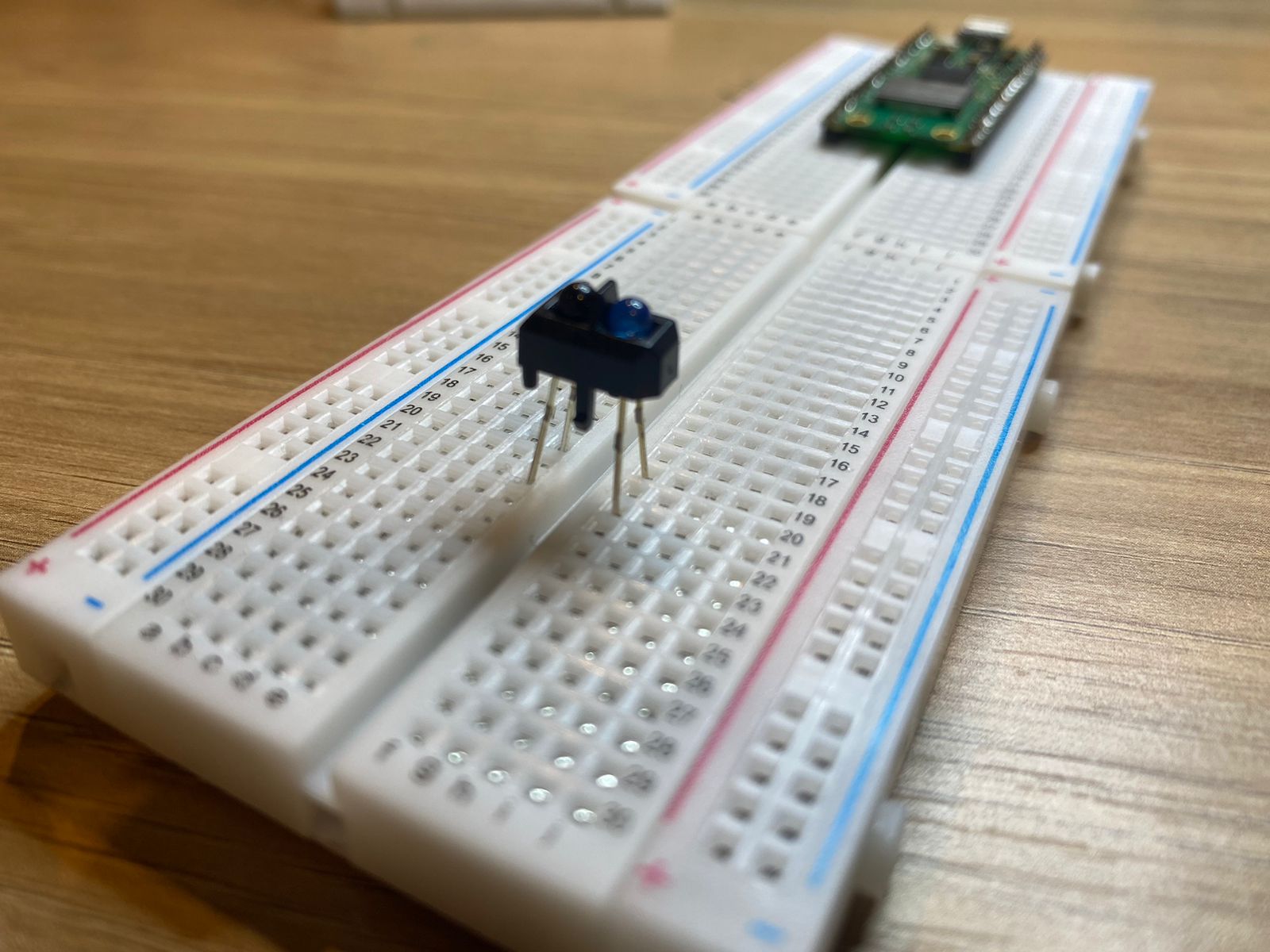
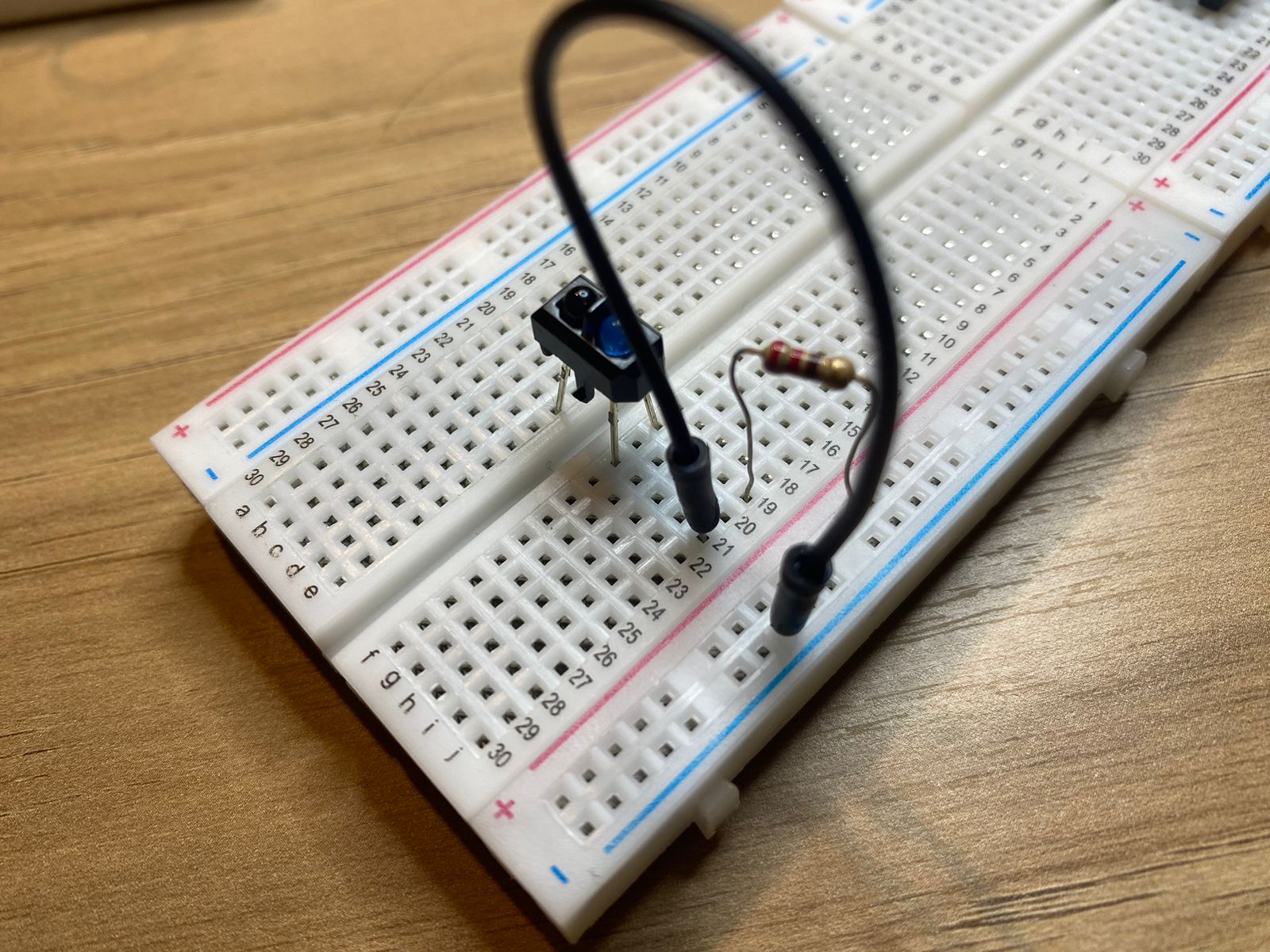
3. Agora iremos montar o nosso sensor TCRT5000, primeiro passo é conectá-lo na protoboard desta forma:
Realize o posicionamento do sensor na protoboard da seguinte maneira:
Imagem 13 - Posicionamento do sensor na protoboard
Fonte: Elaboração própria
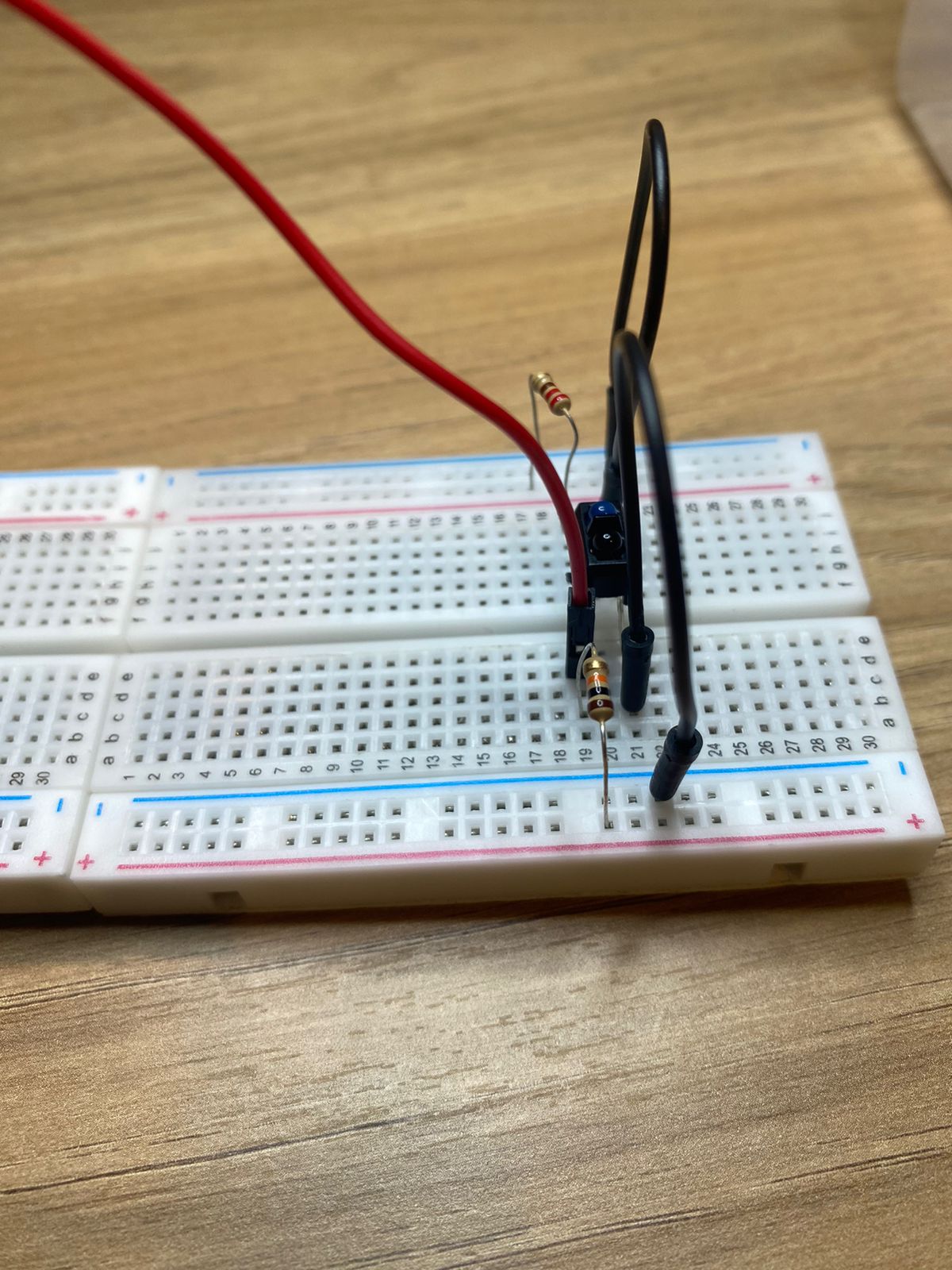
Primeiro, iremos conectar um dos lados do sensor ao resistor dessa maneira:
Imagem 14 - Posicionamento do resistor na protoboard
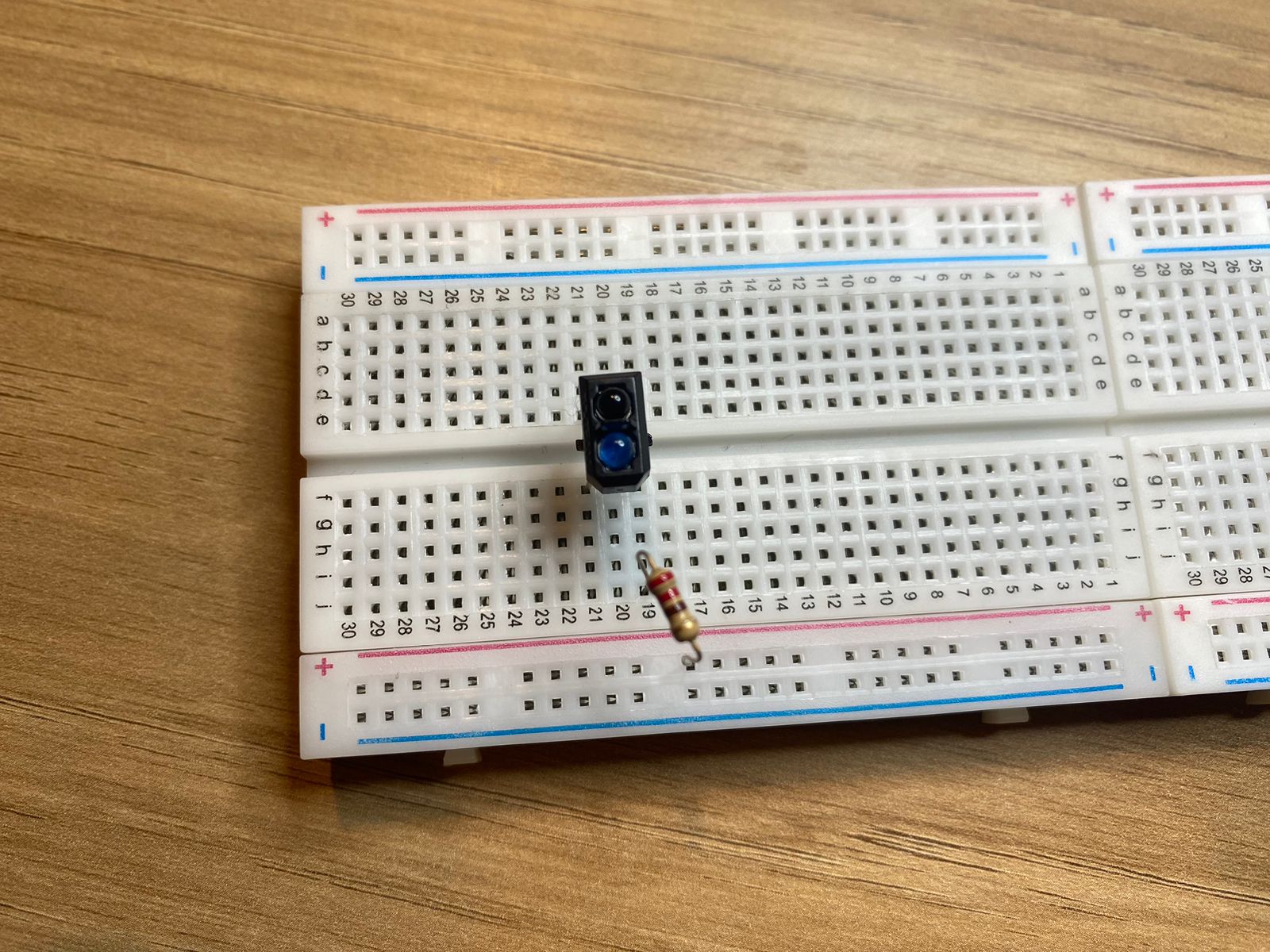
Fonte: Elaboração própria
Agora precisamos conectar o ground (GND) a um terminal do nosso sensor:
Imagem 15 - Posicionamento do GND do sensor na protoboard
Fonte: Elaboração própria
Iremos replicar esses últimos dois passos para o outro lado do sensor:
Imagem 16 - Posicionamento do resistor na protoboard
Fonte: Elaboração própria
Imagem 17 - Posicionamento do GND do sensor na protoboard
Fonte: Elaboração própria
Para conectar o buzzer, é necessário conectar o positivo ao pino de 3V3 e o negativo ao GND:
Imagem 18 - Conecxão do buzzer

Fonte: Elaboração própria
Por último, iremos conectar o sensor à nossa porta lógica GP26_AQ(porta 31) na placa, da seguinte forma:
Imagem 19 - Posicionamento do sensor em uma porta lógica na placa
Fonte: Elaboração própria
Imagem 20 - Posicionamento final do sensor na protoboard
Fonte: Elaboração própria
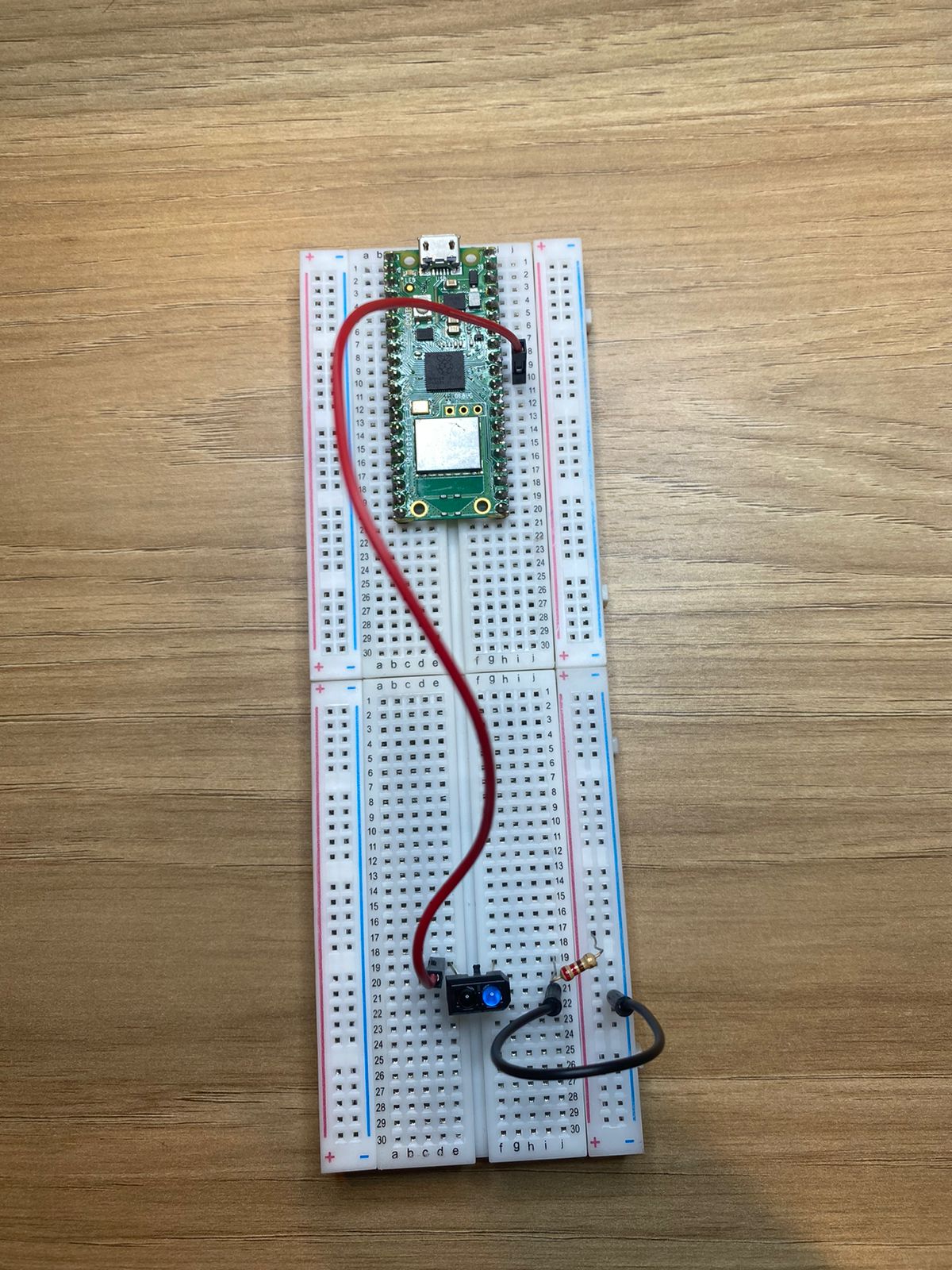
Circuito ao terminar sua montagem:
E por fim, nosso circuito deve estar parecido com algo assim no final de sua montagem (a placa está separada, entretanto as conexões que levam até ela estão posicionadas da mesma maneira descrita):
Imagem 21 - Montagem final do circuito
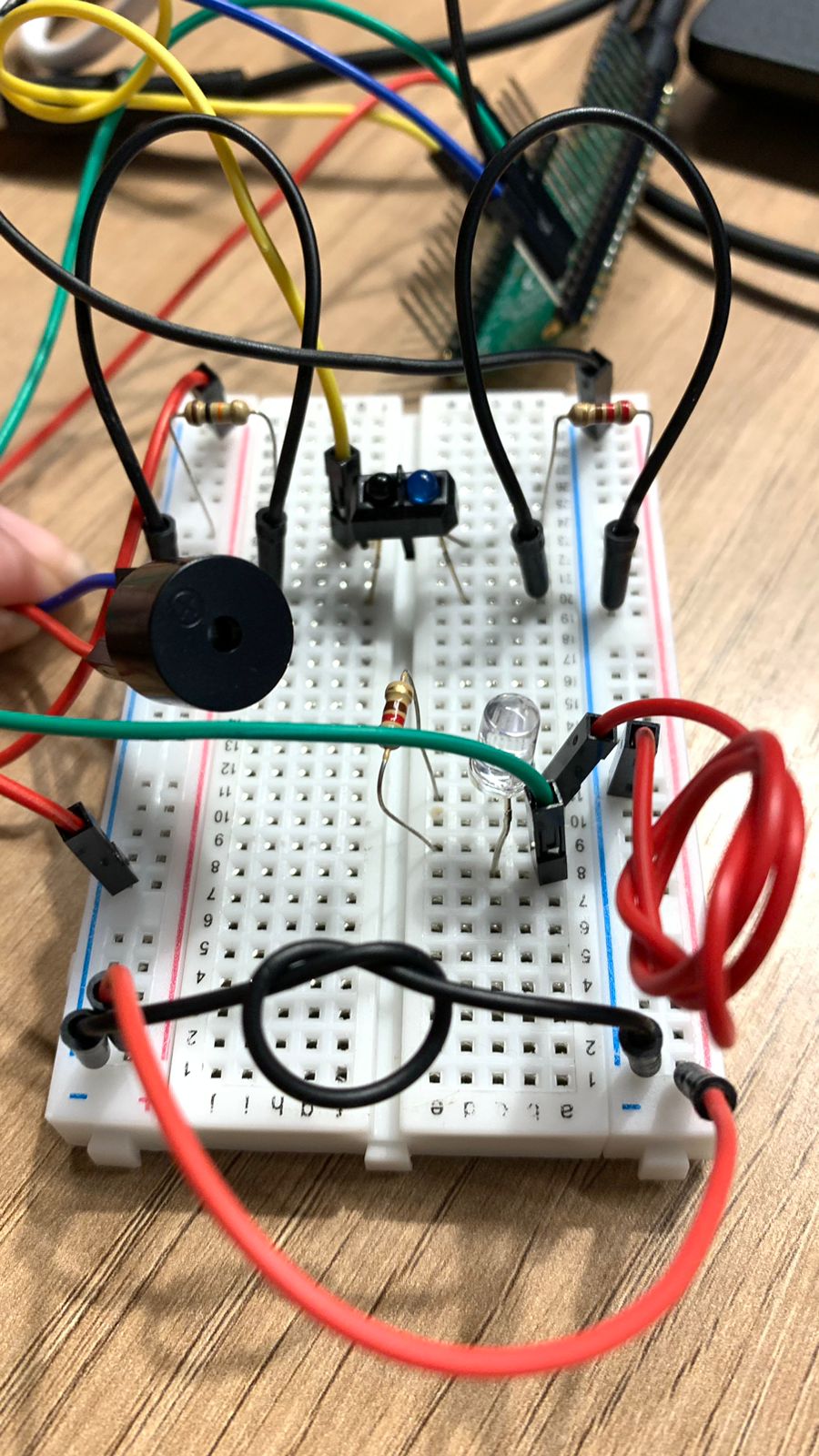
Fonte: Elaboração própria
A compreensão da montagem do circuito deve ficar clara ao encarregado de seguir o passo a passo. Caso seja necessário um melhor entendimento do circuito, entre em contato com a seguinte organização que representa o grupo ARM clicando aqui.