Arquitetura
Introdução
Antes de iniciar a explicação da arquitetura é recomendado ao leitor que leia a secção Segunda sprint. Neste texto existem explicações em mais detalhes sobre os motivos das alterações que foram realizadas no projeto.
Mudança de escopo
Após conversas com funcionários da Atvos, foi explicado que o processo de manutenção é realizado semanalmente e há necessidade de que seja algo bem rápido.
Assim, ao invés de ser um robô que realiza o mapeamento dos tubos e em seguida insere uma câmera endoscópica em cada tubo para verificar se ainda existem vestígios de sujeira, o grupo optou por um caminho mais simples e que gera valor em outras frentes para a empresa.
O novo robô tem como objetivo ficar circulando por dentro do reboiler em funcionamento e medir informações internas como temperatura, concentração de açúcares e qualquer outro tipo de medição que auxilie a manutenção dos reboilers.
Em suma, o objetivo do robô nesta sprint é ser guiado pelo operador dentro do reboiler em funcionamento, gerar um fluxo de dados dessa medição e permitir que exista uma interface para que o usuário consiga interagir com o robô e visualizar os dados.
Vantagens do novo projeto
A mudança de escopo muda o objetivo que o robô tem. Ao invés de uma solução que garante a qualidade da limpeza. Foi feito a mudança para um robô que gera dados e ajuda na tomada de decisões de manutenção. São dois os principais ganhos que essa nova arquitetura atinge.
Geração de dados Com o aumento exponencial da capacidade computacional dos computadores e um ambiente de negócios cada vez mais competitivo, um projeto que gera um fluxo de dados tem grande valor para a companhia. Primeiramente, é possível criar um dashboard que permite visualizar em tempo real os dados de dentro do reboiler e ajudar na tomada de decisão. Além disso, um fluxo de dados permite a criação de um futuro data warehouse e a implementação de modelos de IA proprietários que ajudam na tomada de decisão baseada em dados.
Aumento de produtividade Com um robô que é capaz de coletar informações intermitentes sobre o ambiente industrial em que está inserido, é possível criar um dashboard que permite visualizar em tempo real os dados de dentro do reboiler e ajudar na tomada de decisão se o reboiler já chegou a um ponto em que é necessário interromper a operação. Assim, o reboiler só é desligado no momento correto e garante o máximo de produtividade sem desligamentos desnecessários.
Nova arquitetura
Fluxo de dados na arquitetura 2.0
Com base no que foi desenvolvido na sprint passada, nessa secção será apresentada o novo fluxo de dados e como que o mesmo irá funcionar.
O processo continua dividido em duas etapas. A primeira é o mapeamento do reboiler e a segunda é a medição constante da temperatura dentro do reboiler. Ambas serão detalhadas a seguir, sendo o mapeamento fidedigno do ambiente o primeiro passo para o correto funcionamento da solução.
Mapeamento do ambiente
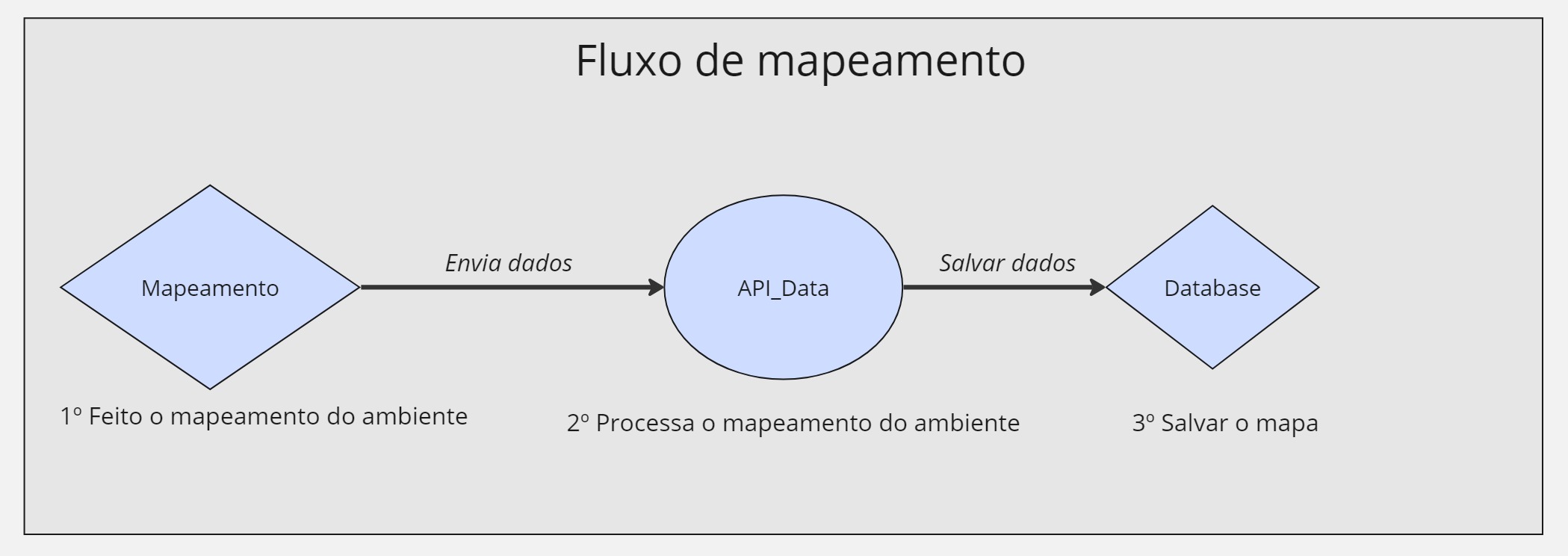
O primeiro fluxo é o de mapeamento do ambiente, responsável por mapear o reboiler e permitir com que o robô consiga se localizar e gerar um mapa do local.
Na figura abaixo, é possível entender melhor como o mapeamento vai funcionar.
Figura Fluxo de Mapeamento
Fonte: Elaborado por Cannabot
-
1º Mapeamento do ambiente : Utilizando técnicas como o SLAM, será realizado o mapeamento do reboiler e o robô consegue se localizar.
-
2º Processamento do mapa : O mapa precisa ser processado para que possa ser armazenado no banco de dados.
-
3º Salvar o mapa : O mapa que foi processado é salvo no banco de dados.
Fluxo de utilização
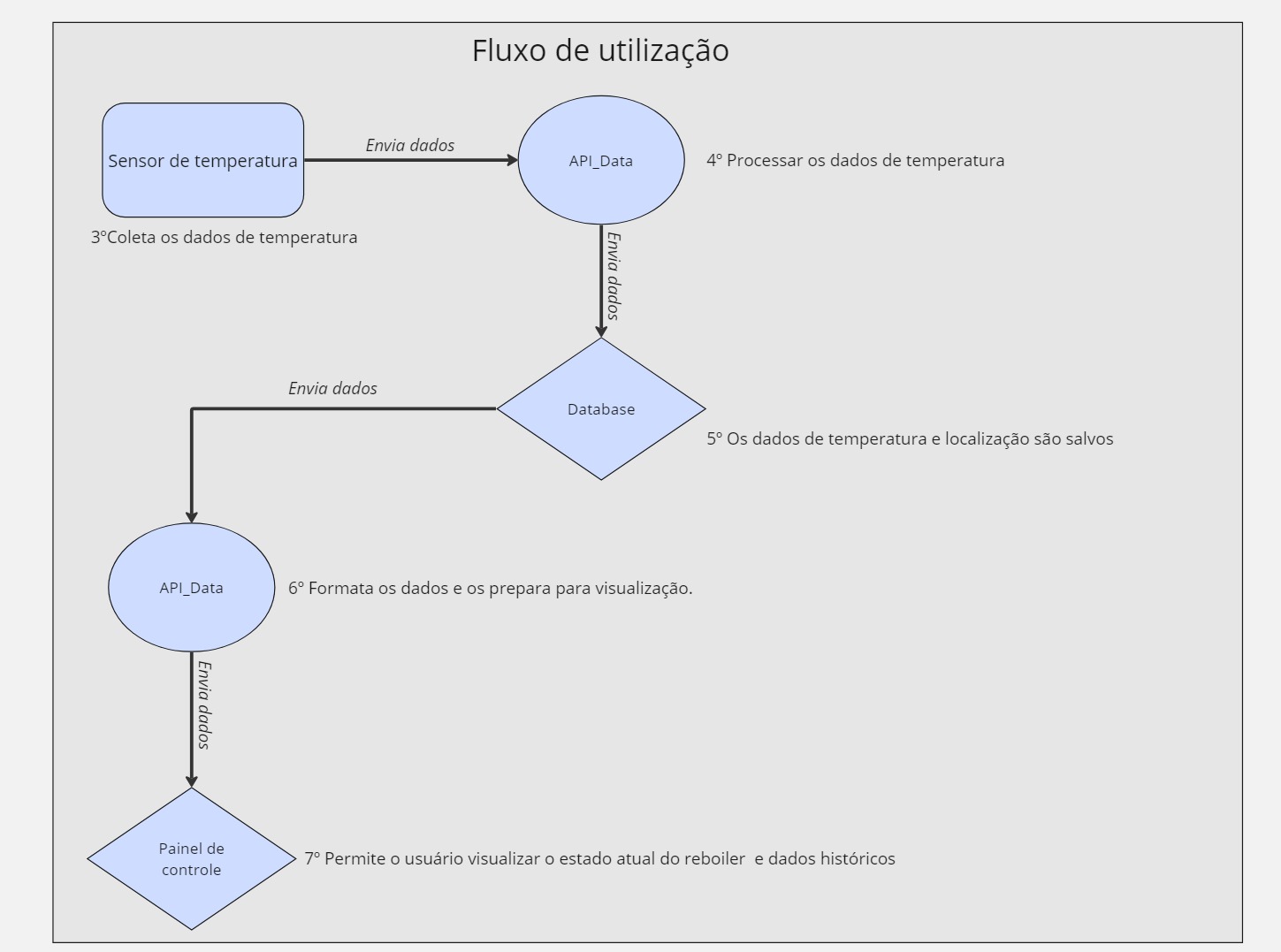
Após a conclusão bem-sucedida do mapeamento, segue-se a utilização da solução. Aqui, quem assume o controle é o operador do robô, que tem a habilidade de escolher para onde o robô deve ir. Nas próximas sprints, o grupo deseja implementar métodos de controle autônomo para o robô, assim criando uma solução que não depende de humanos para controlar o robô.
Na figura abaixo, é possível entender melhor como o mapeamento vai funcionar.
Figura Fluxo de Utilização
Fonte: Elaborado por Cannabot
Após o mapeamento o robô precisa prosseguir com o fluxo de utilização do robô. Coletando os dados de temperatura e gerando um heatmap.
-
3º Coleta de dados : Conforme o robô se movimenta é feita a coleta de dados da temperatura.
-
4º Processar os dados de temperatura : Os dados do sensor são enviados para a API e ocorre o processamento. Esta etapa envolve o ajuste de dados e a localização do mesmo para a criação de um heatmap.
-
5º Salvar os dados : Os dados que foram processados são salvos no banco de dados para uso futuro.
-
6º Formatação e criação da imagem : Os dados são coletados do banco de dados e novamente processados para permitir a criação de um heatmap.
-
7º Visualização : Nesta etapa, além de visualizar o heatmap com informações importantes é possível checar o histórico das medições e outras informações importantes.
Por fim, é esperado que com o entendimento do fluxo de informações a arquitetura que será descrita posteriormente faça mais sentido.
Arquitetura
Pensando em uma arquitetura modularizada capaz de atender às demandas especificadas anteriormente, foi desenvolvido o esquemático abaixo para representar essa primeira iteração.
Figura Arquitetura
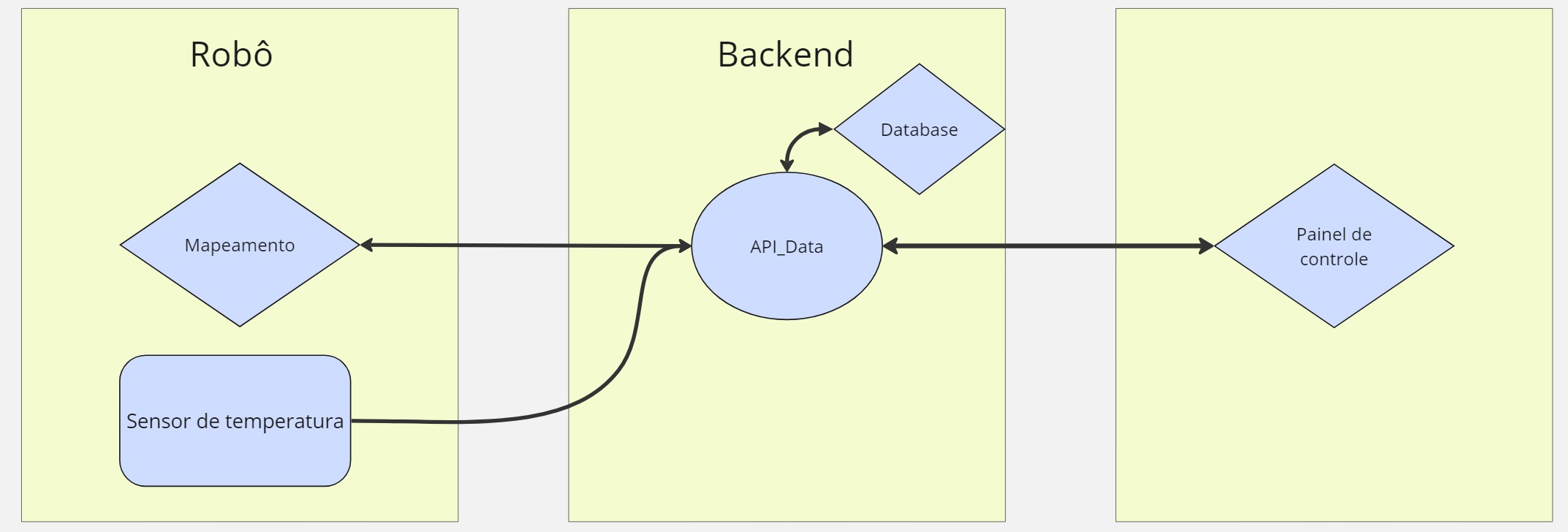
Fonte: Elaborado por Cannabot
Legenda: Um aspecto importante ao observar a arquitetura é que cada quadrado representa um bloco individual do sistema. Além disso, as figuras em formato de losango representam partes do software, enquanto os retângulos representam peças de hardware e o circulo é a API que é o coração de todo o sistema no momento.
Nos parágrafos a seguir, serão destacados a função de cada um desses módulos e a integração dos mesmos.
Mapeamento
O módulo de mapeamento é responsável por mapear o reboiler. O objetivo é permitir que o operador controle o robô e, nas próximas semanas, implementar um sistema de movimentação autônoma. O mapeamento possivelmente será realizado por SLAM, que é uma tecnologia que utiliza raios infravermelhos para permitir que o robô mapeie o ambiente e saiba onde está no momento.
Sensor de temperatura
O sensor de temperatura é a responsável por coletar as medições de dentro do reboiler e enviar para a API_Data. O modelo de sensor exato ainda não foi definido, mas precisa ser resistente e ter um grau elevado de precisão na medição de temperatura produto.
API_Data
A api_Data é o coração da solução. Atualmente, ela tem o objetivo de conectar partes distintas nos seguintes casos :
- Receber o mapa e salvar no banco de dados.
- Receber os dados de temperatura e processá-las.
- Salvar os dados da etapa anterior no backend.
- Montar o heatmap do reboiler e enviar os dados interface (frontend).
Como o projeto ainda não teve nenhum desenvolvimento de código no frontend/API, o grupo ainda não decidiu as tecnologias que serão utilizadas. No entanto, é provável que seja utilizado o FastAPI, que é um framework de Python que funciona de forma assíncrona.
No futuro, há grandes chances de o grupo optar por dividir essa API em partes menores, visando aumentar a modularidade do código. Nas próximas sprints, versões mais aprimoradas serão desenvolvidas.
Banco de dados
O banco de dados para esse projeto tem duas missões especifícas:
- Salvar o mapa.
- Salvar informações sobre a temperatura.
Assim, um banco de dados relacional é uma escolha mais adequada para esse tipo de projeto, visto que permite a criação de relações entre tabelas, o que é fundamental para garantir a rastreabilidade de cada tubo dentro do reboiler.
Duas opções a serem consideradas neste caso são o PostgreSQL ou o SQLite3. Nas próximas sprints, onde haverá o desenvolvimento de código, ocorrerá o detalhamento da tecnologia escolhida e os motivos por trás dela.
Painel de Controle
O painel de controle é responsável por permitir uma visualização geral dos tubos do reboiler e caso exista tubos sujos há um aviso indicando o estado atual de cada tubo.
Dada a experiência prévia dos membros do grupo em desenvolvimento web, o framework escolhido provavelmente será o React, visto que sua documentação é ampla e a conexão com um backend em FastAPI é bastante simples.
Conclusão
Após as conversas na apresentação da primeira sprint, foi possível compreender melhor o projeto e conceber um método para atender às demandas da Atvos. Assim, as mudanças feitas na arquitetura refletem um melhor entendimento do problema e buscam implementar uma solução que tenha valor prático para a Atvos. Um robô que coleta temperatura e serve como início de um pipeline de dados é algo de grande valia para a empresa.
Nas próximas versões da arquitetura, haverá mais atualizações e mudanças, as quais serão implementadas à medida que os membros do grupo desenvolvem cada componente do sistema.
Por último, mas não menos importante, é preciso levar em consideração que as escolhas de tecnologias nesta etapa estão sujeitas a alterações, visto que o foco da segunda sprint foi o desenvolvimento de um método para controlar o robô e a prototipação da interface gráfica.