Arquitetura
Introdução
A arquitetura de um sistema é uma parte primordial para compreender como as diferentes partes se conectam e como a integração dessas partes foi pensada.
Nesta primeira interação, foi concebida uma arquitetura simples. O objetivo inicial é permitir que o robô mapeie o reboiler para se localizar e identificar os tubos individuais. Posteriormente, o robô se desloca para cada tubo, inserindo uma câmera de endoscopia dentro do cano para realizar a análise dos dados. Isso permite que o modelo de inteligência artificial determine se o tubo está limpo ou não.
Fluxo de dados na arquitetura
Para facilitar a compreensão da arquitetura, foi desenvolvido um fluxo de dados correspondente. Isso permite entender os dois principais processos abordados na primeira iteração da solução.
Antes de mais nada, dado que o grupo ainda não teve nenhum contato prévio com o robô, alguns detalhes mais minuciosos não foram decididos. No entanto, a ideia inicial é realizar o mapeamento e, em seguida, permitir que o usuário da solução movimente o robô e analise cada tubo conforme sua vontade.
O processo está dividido em duas etapas. A primeira é o mapeamento e a segunda é a identificação de tubos que contenham impurezas. Ambas serão detalhadas a seguir, sendo o mapeamento fidedigno do ambiente o primeiro passo para o correto funcionamento da solução.
Mapeamento do ambiente
O primeiro fluxo é o de mapeamento do ambiente, responsável por mapear o reboiler e permitir com que o robô consiga se localizar e gerar um mapa do local.
Na figura abaixo, é possível entender melhor como o mapeamento vai funcionar.
Figura Fluxo de Mapeamento
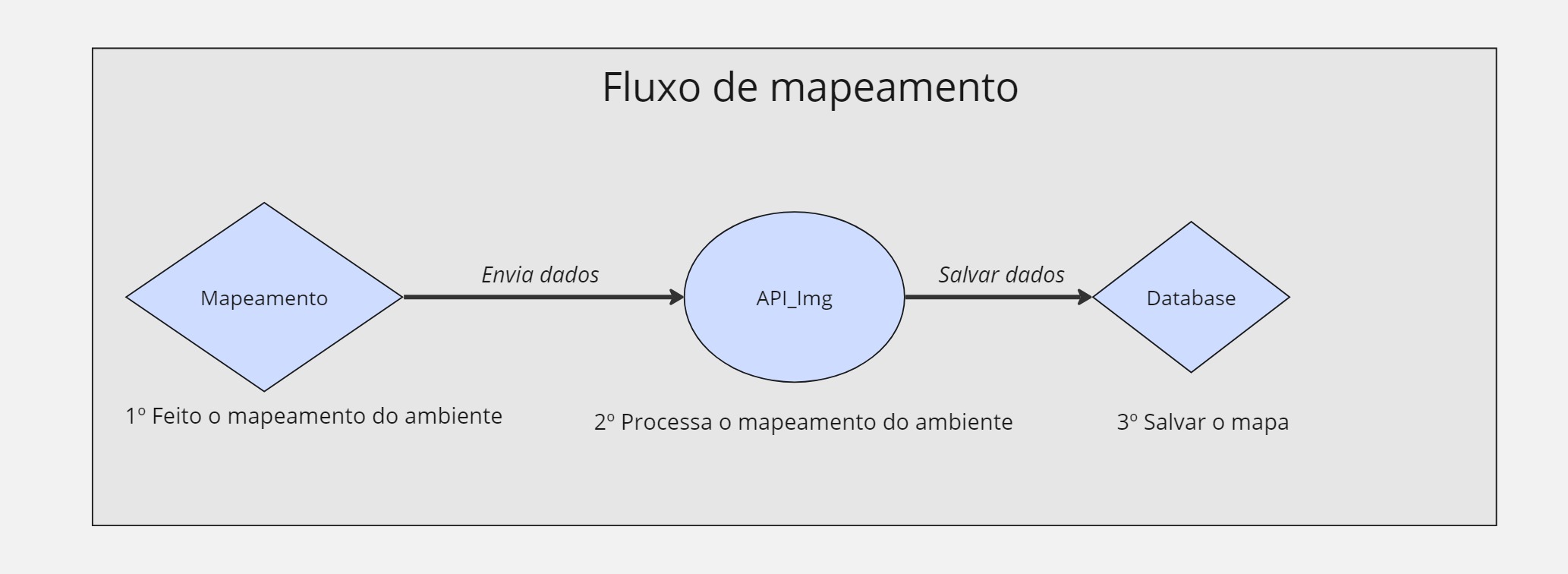
Fonte: Elaborado por Cannabot
-
1º Mapeamento do ambiente : Utilizando técnicas como o SLAM, será realizado o mapeamento do reboiler e a identificação da localização de cada tubo.
-
2º Processamento do mapa : O mapa precisa ser processado para que possa ser armazenado no banco de dados.
-
3º Salvar o mapa : O mapa que foi processado é salvo no banco de dados.
Fluxo de utilização
Após a conclusão bem-sucedida do mapeamento, segue-se a utilização da solução. Aqui, quem assume o controle é o operador do robô, que tem a habilidade de escolher para onde o robô deve ir e qual tubo ele gostaria de verificar.
Na figura abaixo, é possível entender melhor como o mapeamento vai funcionar.
Figura Fluxo de Utilização
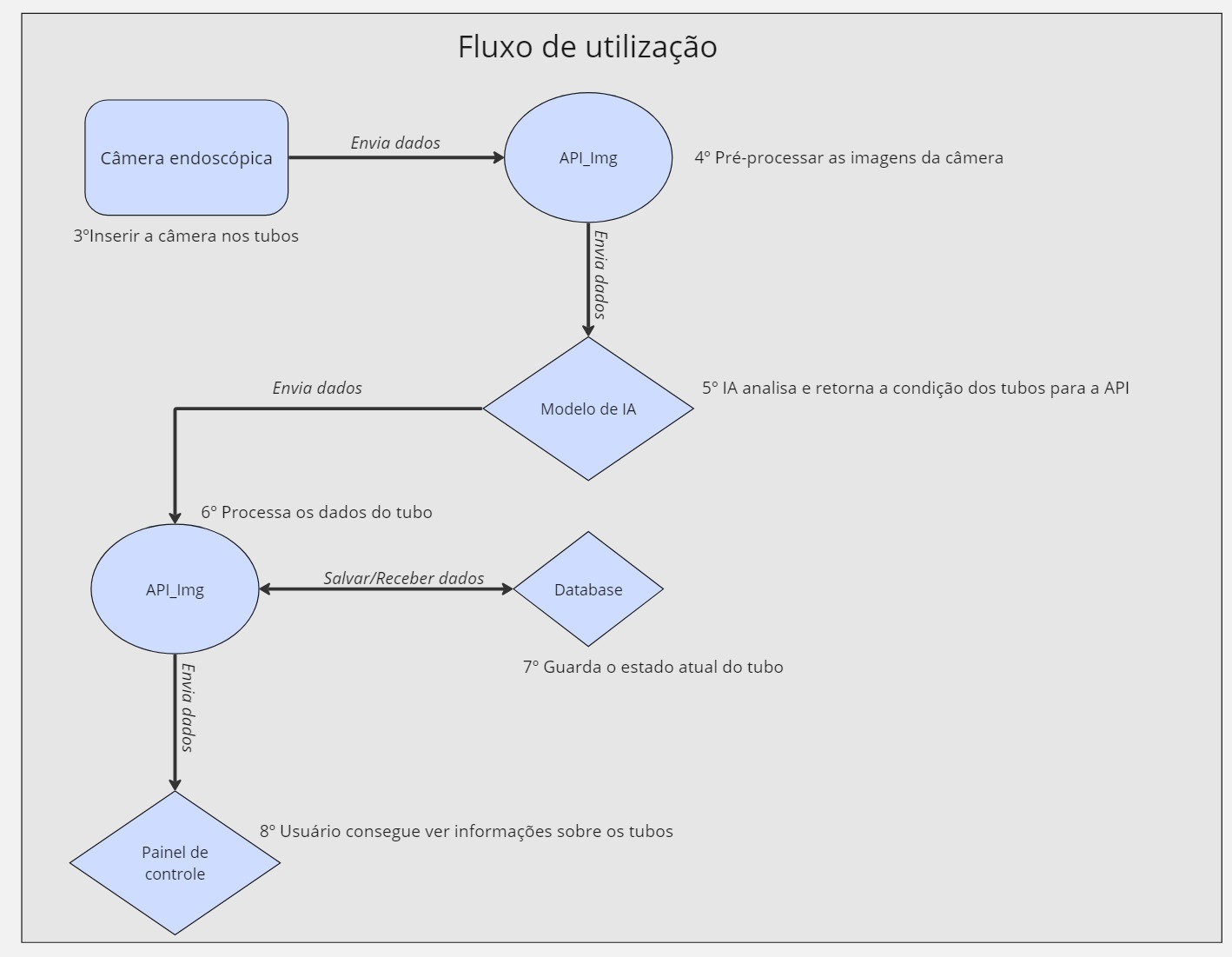
Fonte: Elaborado por Cannabot
Após o mapeamento com sucesso o usuário é capaz de decidir como prosseguir com o fluxo de utilização do robô. Considerando que o mesmo queira realizar a checagem de um tubo o processo é o seguinte.
-
3º Inserir câmera : A partir de um input do usuário, a câmera é enfiada dentro do tubo.
-
4º Processar imagens da câmera : As imagens da câmera são enviadas para a API e ocorre o pré-processamento. Esta etapa envolve tratamentos na imagem que aumentem o contraste entre o tubo e a sujeira, facilitando a detecção de impurezas pelo modelo
-
5º Análise de imagens : O modelo de IA processa as imagens e retorna se há impurezas ou não no tubo.
-
6º Processamento dos dados do tubo : Após a resposta sobre a limpeza do tubo, é necessário determinar sua localização e consolidar todas essas informações para uso futuro.
-
7º Guardar o estado do tubo : Nesta etapa, os dados gerados no passo anterior são salvos em um banco de dados e podem ser consumidos pela API imediatamente.
-
8º Visualização de dados : Após as informações do tubo serem salvas. É possível consultar as mesmas em uma uma página web interativa que contém todas as informações sobre os tubos que foram analisados.
Por fim, é esperado que com o entendimento do fluxo de informações a arquitetura que será descrita posteriormente faça mais sentido.
Arquitetura
Pensando em uma arquitetura modularizada capaz de atender às demandas especificadas anteriormente, foi desenvolvido o esquemático abaixo para representar essa primeira iteração.
Figura Arquitetura
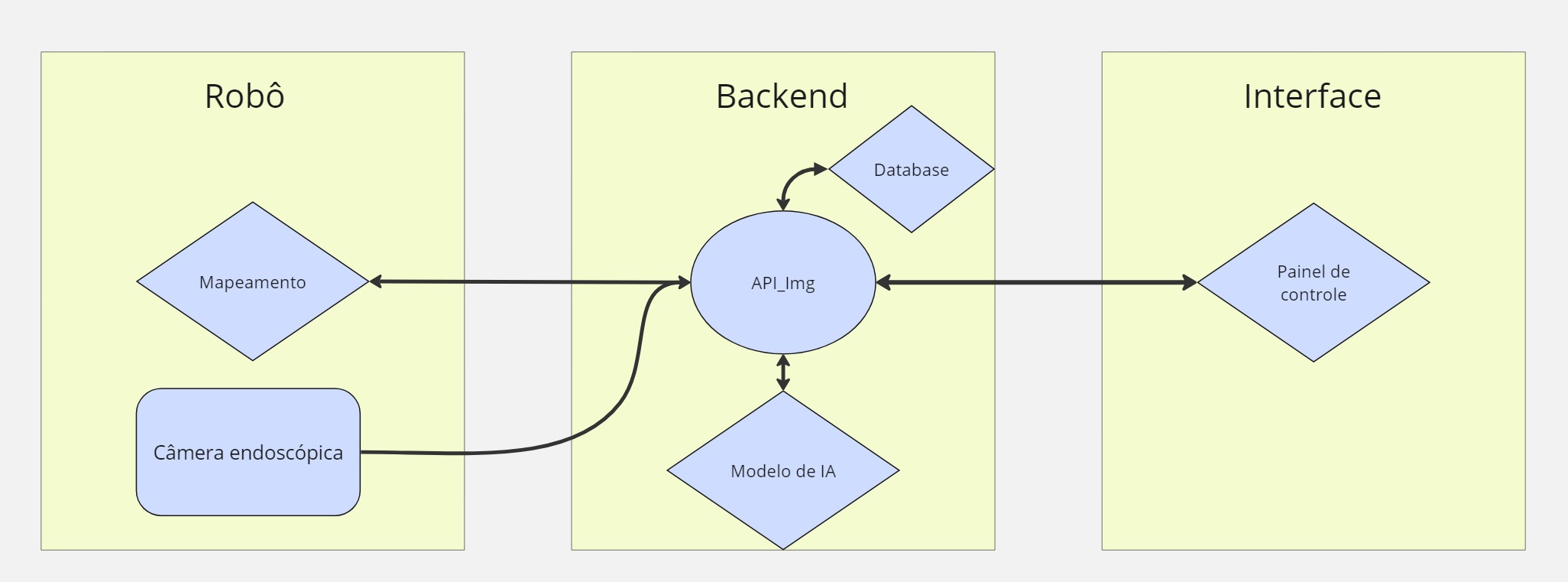
Fonte: Elaborado por Cannabot
Legenda: Um aspecto importante ao observar a arquitetura é que cada quadrado representa um bloco individual do sistema. Além disso, as figuras em formato de losango representam partes do software, enquanto os retângulos representam peças de hardware e o circulo é a API que é o coração de todo o sistema no momento.
Nos parágrafos a seguir, serão destacados a função de cada um desses módulos e a integração dos mesmos.
Mapeamento
O módulo de mapeamento é responsável por mapear o reboiler e identificar cada buraco individual. O objetivo é haver um controle e um método que permita com que o robô saiba onde está no espaço e garantir que todos os 2000 tubos sejam verificados. O mapeamento possívelmente será realizado por SLAM que é uma tecnologia que utiliza raios infravermelhos para permitir com que o robô mapeie o ambiente e saiba onde está no momento.
Câmera endoscópica
A câmera é a responsável por gravar as imagens dentro do tubo e enviar as imagens para a API_Img. O modelo de câmera exato ainda não foi definido, mas provavelmente será algo similar ao seguinte produto.
API_Img
A api de imagem é o coração da solução. Atualmente, ela tem o objetivo de conectar partes distintas nos seguintes casos :
- Receber o mapa e salvar no banco de dados.
- Receber as imagens da câmera e pré-processá-las.
- Enviar as imagens para a IA.
- Receber e processar as respostas da IA junto com dados do tubo que foi analisado.
- Salvar os dados da etapa anterior no backend.
- Enviar os dados dos tubos para a interface (frontend).
Como o projeto ainda não teve nenhum desenvolvimento de código, visto que a primeira Sprint no modelo Inteli é baseada no entendimento do negócio, o grupo ainda não decidiu as tecnologias que serão utilizadas para a API. No entanto, é provável que seja utilizado o FastAPI, que é um framework de Python que funciona de forma assíncrona. A maioria dos membros da equipe já possui experiência com esse framework, além da vasta documentação disponível online.
No futuro, há grandes chances de o grupo optar por dividir essa API em partes menores, visando aumentar a modularidade do código. Nas próximas sprints, versões mais aprimoradas serão desenvolvidas.
Banco de dados
O banco de dados para esse projeto tem duas missões especifícas:
- Salvar o mapa
- Salvar informações sobre o tubo
Assim, um banco de dados relacional é uma escolha mais adequada para esse tipo de projeto, visto que permite a criação de relações entre tabelas, o que é fundamental para garantir a rastreabilidade de cada tubo dentro do reboiler.
Duas opções a serem consideradas neste caso são o PostgreSQL ou o SQLite3. Nas próximas sprints, onde haverá o desenvolvimento de código, ocorrerá o detalhamento da tecnologia escolhida e os motivos por trás dela.
Modelo de IA
O modelo de IA tem como seu principal objetivo verificar se um tubo esta limpo ou não. Com base nessa informação os dados são enviados para o frontend.
A tecnologia do modelo de visão computacional ainda não foi escolhida, mas como não há um dataset disponibilizado pela empresa, é provável que seja utilizado algum modelo pré-treinado.
Ao realizar uma pesquisa na literatura científica sobre o tema, é possível encontrar artigos sobre a utilização de IA para identificação de obstruções em tubulações.
Os estudos apontam resultados extremamente satisfatórios e indicam uma grande vantagem em utilizar modelos pré-treinados. Especialmente no segundo exemplo, que utiliza redes neurais profundas para detectar obstruções em tubulações de água em ambientes urbanos.
Painel de Controle
O painel de controle é responsável por permitir uma visualização geral dos tubos do reboiler e caso exista tubos sujos há um aviso indicando o estado atual de cada tubo.
Dada a experiência prévia dos membros do grupo em desenvolvimento web, o framework escolhido provavelmente será o React, visto que sua documentação é ampla e a conexão com um backend em FastAPI é bastante simples.
Conclusão
Nesta primeira sprint, o principal objetivo foi compreender o projeto e conceber um método para atender às demandas da Atvos. As próximas versões da arquitetura conterão mais atualizações e mudanças, as quais serão implementadas à medida que os membros do grupo consolidarem seus aprendizados.
Por último, mas não menos importante, é preciso levar em consideração que as escolhas de tecnologias nesta etapa estão sujeitas a muitas alterações, visto que a primeira sprint de desenvolvimento foi dedicada a entender melhor como o problema funciona e quais são as necessidades da Atvos com o robô.